【ENVI精讲】处理专题六:基于遥感的自然生态环境监测

详细信息
一、专题背景
随着社会的不断发展,人们对自然生态环境质量的重视程度逐渐提高。本专题介绍应用遥感技术进行自然生态环境的评价。
二、专题概述
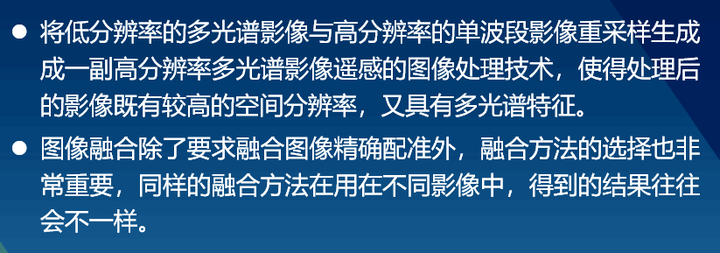
专题中应用10米分辨率的spot和TM融合影像,提取相关生态因子,应用较成熟的自然生态环境评价模型完成整个自然生态环境评价流程。
专题涉及植被覆盖度计算、地形因子提取等内容。
所用功能模块:
-
- 除了使用ENVI主模块功能外。
- 还需要用到大气校正扩展模块中的快速大气校正工具(QUAC)。
- 说明:本专题由于数据的原因,最终结果精度不一定很高。旨在学习生态环境监测的流程及ENVI相关工具的应用。
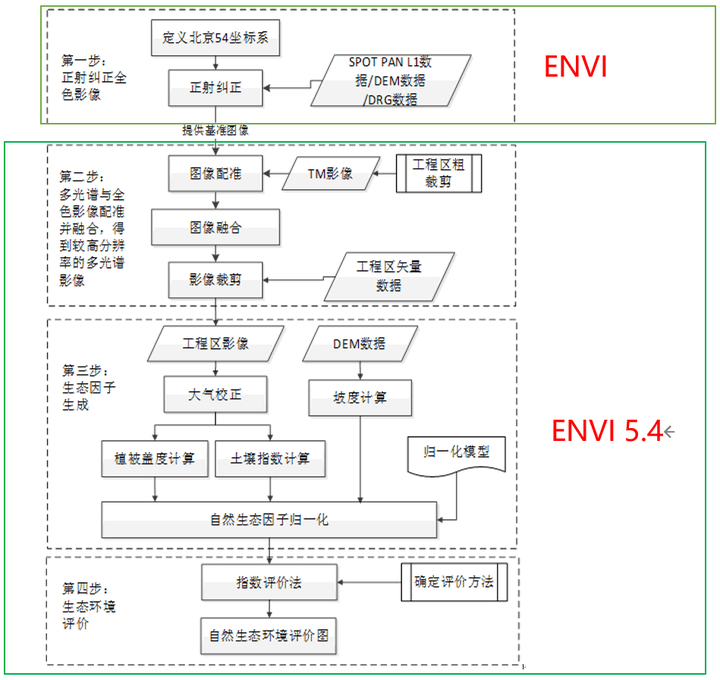
专题处理流程
三、图像基本预处理
1.1 图像基本预处理流程
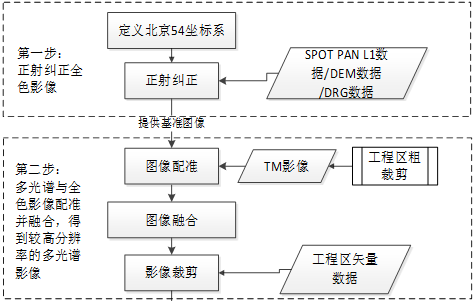
图像预处理流程
- 第一步:对高分辨率的全色影像进行正射纠正(全色影像是10米分辨率的SPOT PAN数据)
- 第二步:高分辨率影像和多光谱影像的配准、融合
- 以SPOT PAN正射纠正结果作为基准影像,对TM影像进行图像配准;对配准后的ETM+数据和SPOT PAN正射校正结果进行图像融合;用工程区矢量数据(湖北襄樊市部分区域)裁剪融合后的图像,得到工程区域10米分辨率的多光谱图像
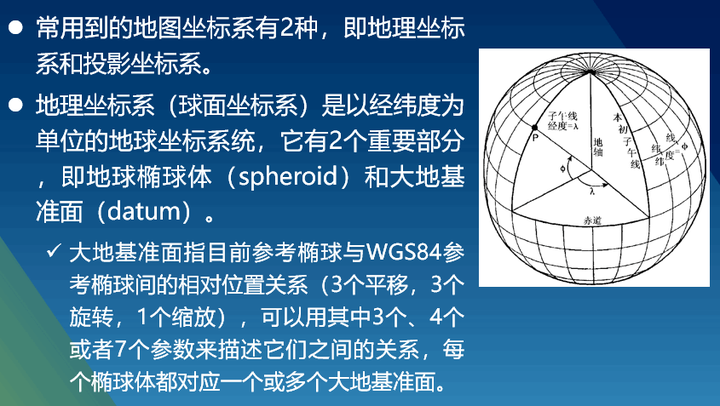
1.2 自定义坐标系 — 地理坐标系
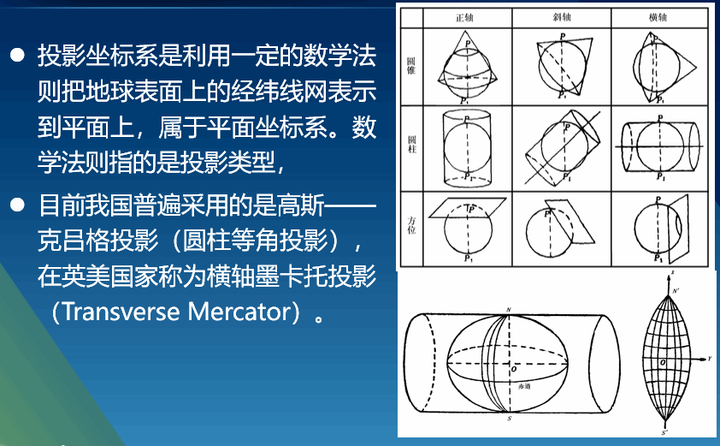
自定义坐标系 — 投影坐标系
自定义坐标系 — 大地坐标
- 在地面上建立一系列相连接的三角形,量取一段精确的距离作为起算边,在这个边的两端点,采用天文观测的方法确定其点位(经度、纬度和方位角),用精密测角仪器测定各三角形的角值,根据起算边的边长和点位,就可以推算出其他各点的坐标。这样推算出的坐标,称为大地坐标。
自定义坐标系 — 国内坐标系
- 均为投影直角坐标系,高斯克里格投影。

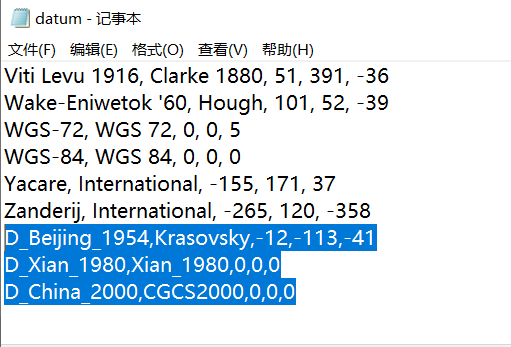
- 国内坐标系实际上指的是我国的三个大地基准面。

自定义坐标系 — 参心与地心坐标系
- 北京54与西安80为参心坐标系。
- CGCS2000为地心坐标系。
- CGCS2000是全球地心坐标系在我国的具体体现,其原点为包括海洋和大气的整个地球的质量中心,CGCS2000是我国当前最新的国家大地坐标系。
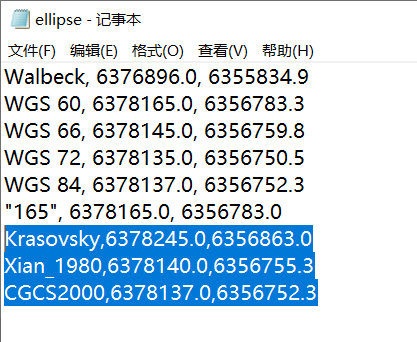
- 采用的椭球体参数:
- 长半轴 a=6378137m
- 扁率 f=1/298.257222101
- 地心引力常数 GM=3.986004418×1014m3s-2
- 自转角速度 ω=7.292l15×10-5rad s-1
1.3 自定义本专题研究区坐标系
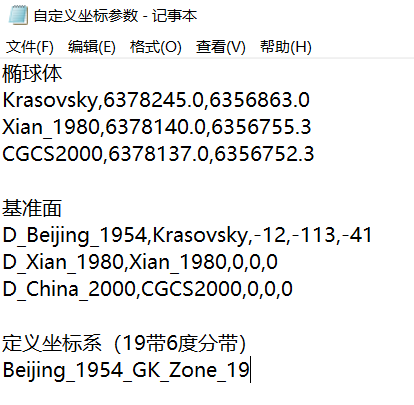
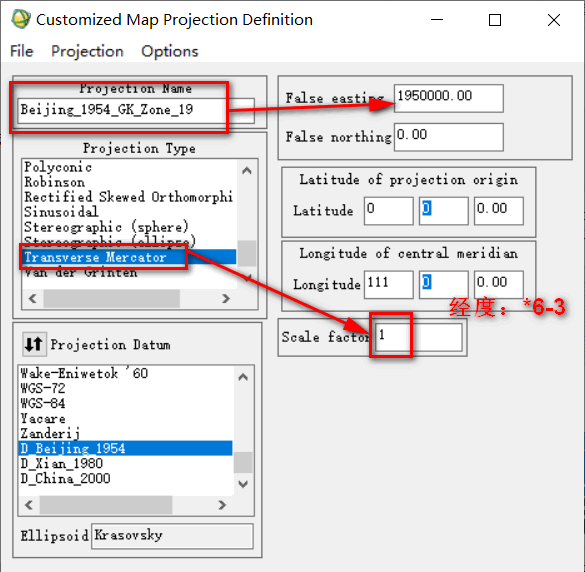
- 查看自定义坐标参数,如下
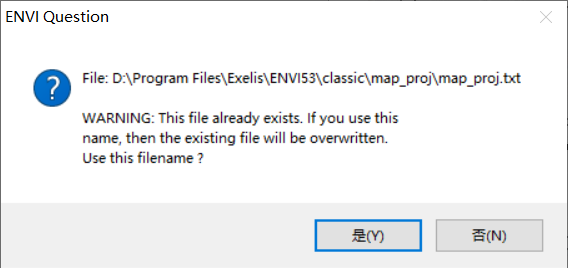
打开ENVI53——classic——map_proj文件夹(ENVI安装文件夹),添加椭球体与基准面自定义参数
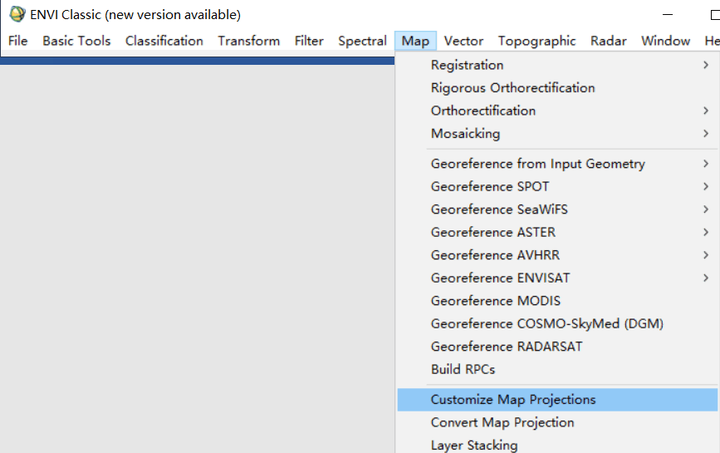
设置坐标系,打开ENVI classic 5.3
点击Map——自定义坐标系
填写坐标系名称,选择横轴墨卡托,在Scale factor填写1代表高斯格里格(如果填写0代表横轴墨卡托),基准面选择北京1954
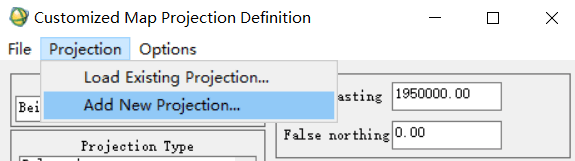
添加坐标系
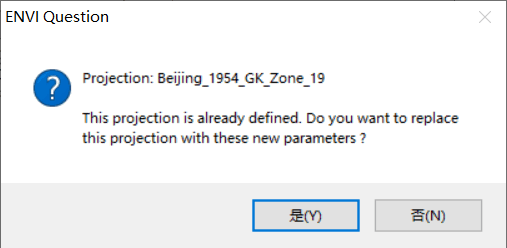
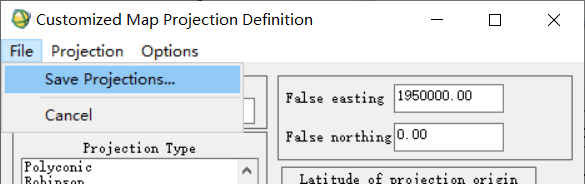
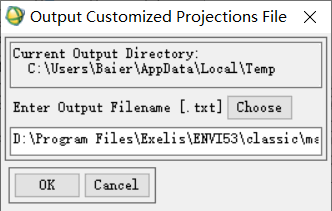
保存坐标系
SPOTPAN正射纠正 — 为什么要进行正射纠正?
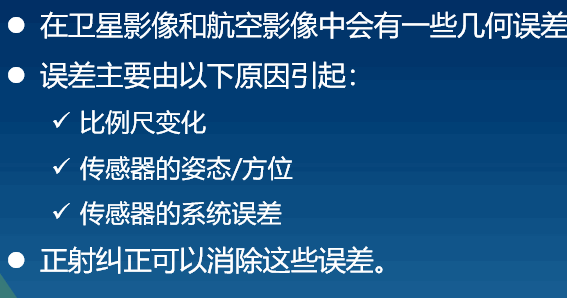
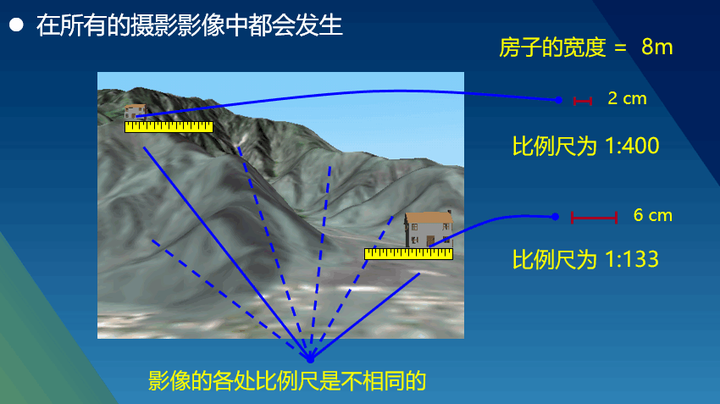
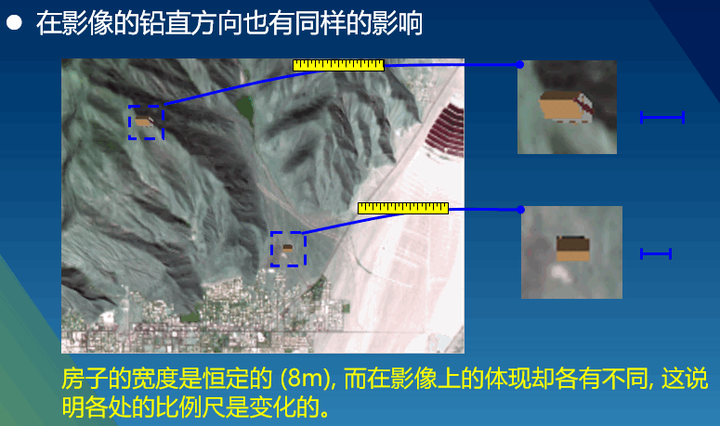
SPOTPAN正射纠正 — 比例尺变化
SPOTPAN正射纠正 — 传感器姿态/方位
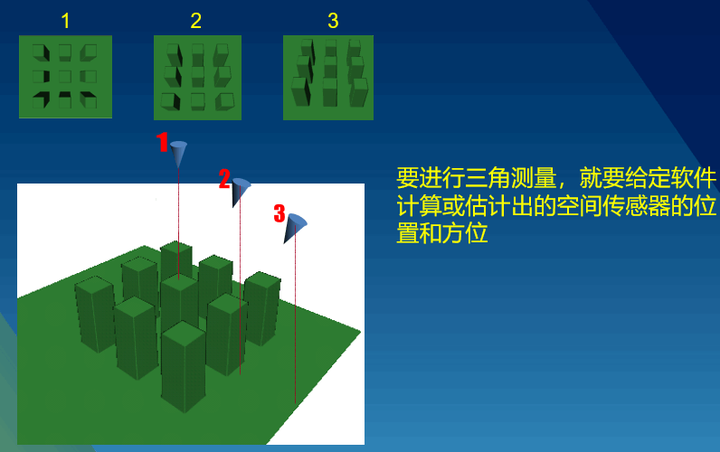
SPOTPAN正射纠正 — 推帚扫描透视中心
SPOT2/4 PAN正射纠正 — 正射纠正使用条件
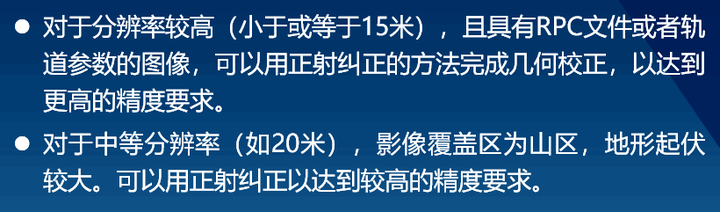
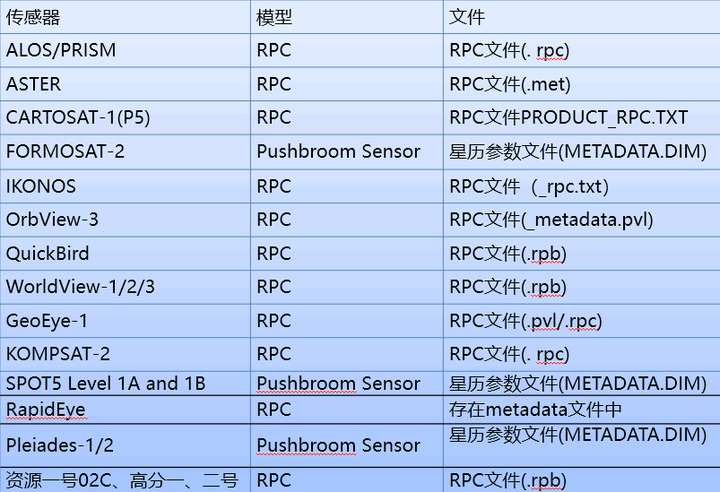
SPOT2/4 PAN正射纠正——常见正射纠正参数文件
操作:进行SPOT2全色图像的正射校正
- 内容:
- 以DRG作为控制点参考源,完成SPOT2全色图像的正射纠正
- 数据:
- \201-专题:基于遥感的自然生态环境监测\1-SPOT PAN正射纠正
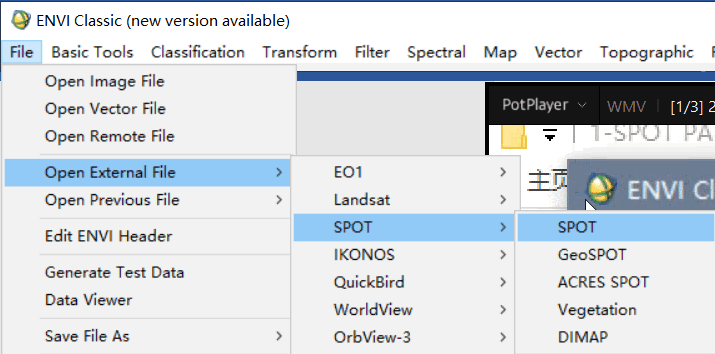
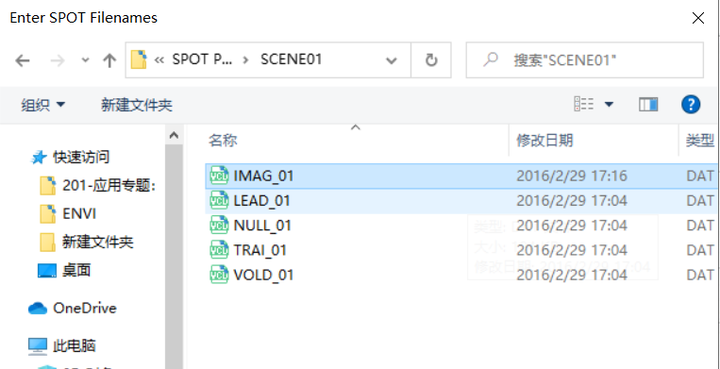
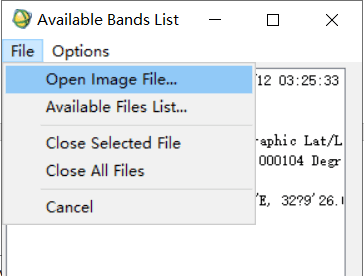
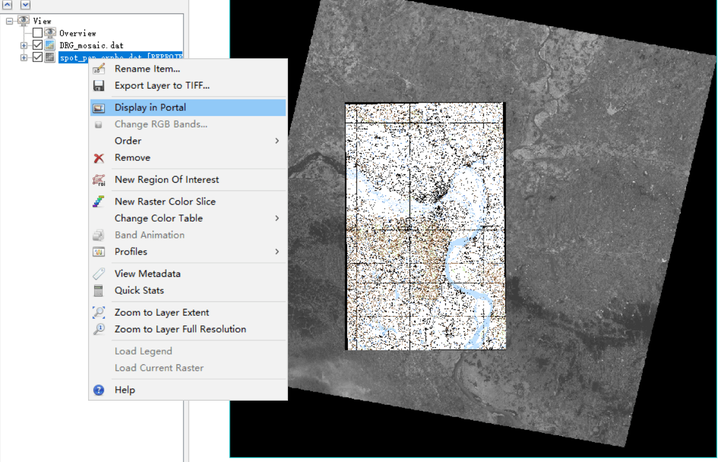
打开数据(Open External File——Spot——Spot——IMAG_01)
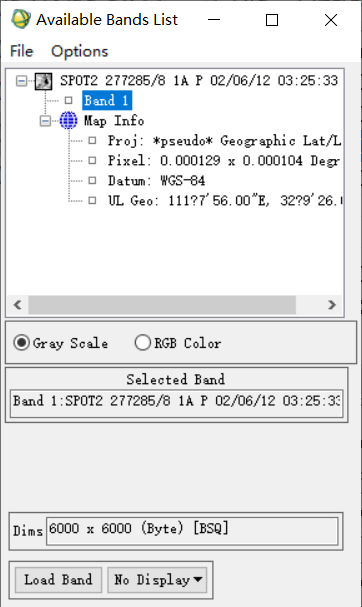
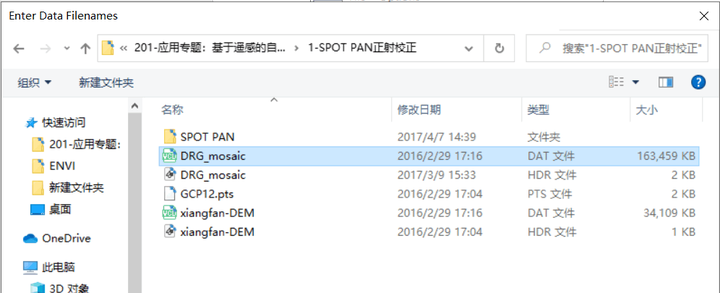
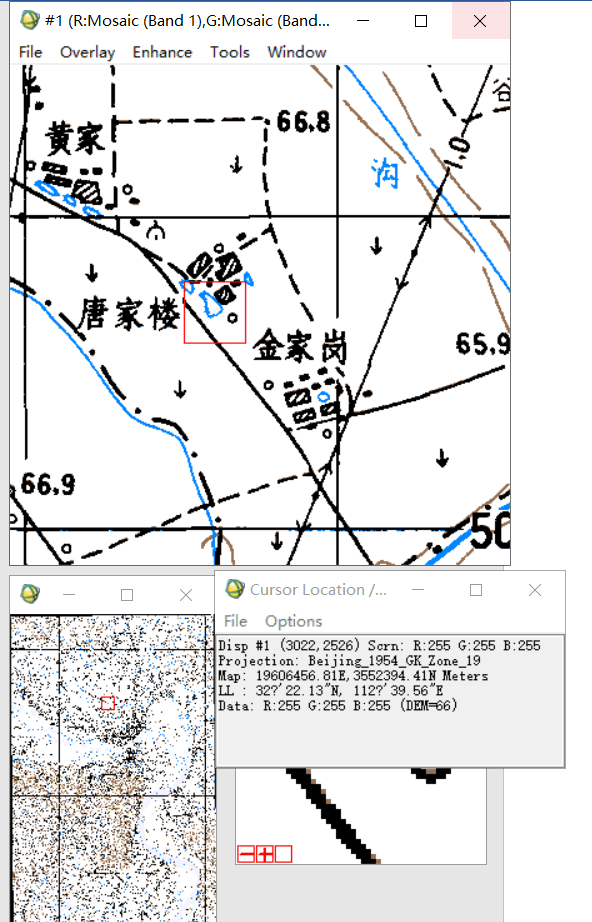
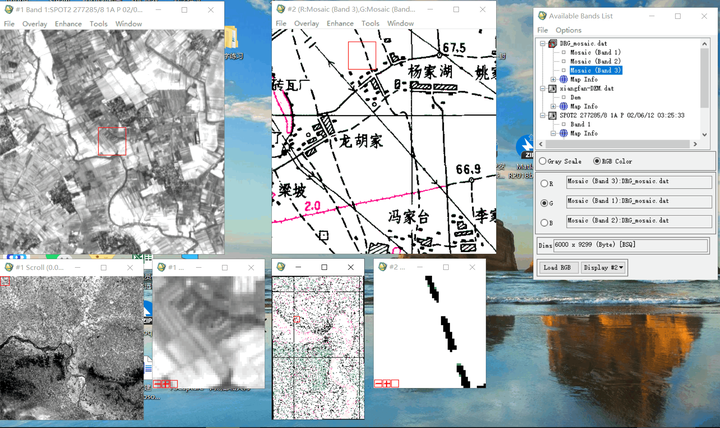
然后打开DGR_mosaic(参考)影像,发现参考影像与DEM影像同时被打开(绑定)
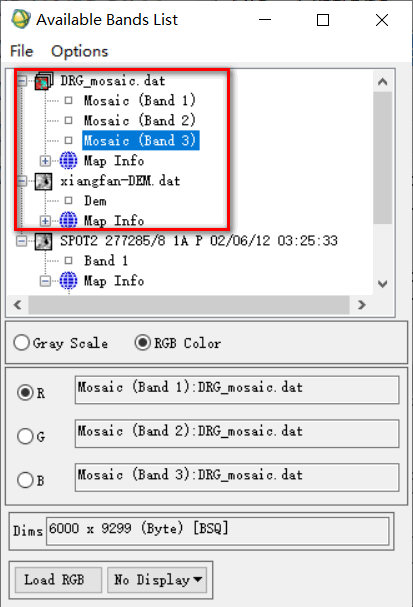
纠正的影像如下,当查看信息可获取坐标信息还可同时读取DEM信息
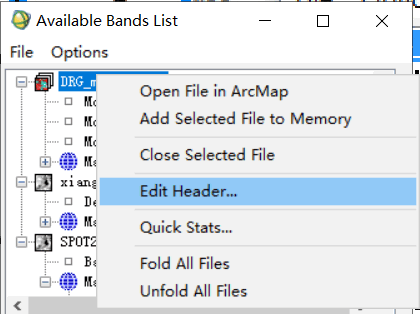
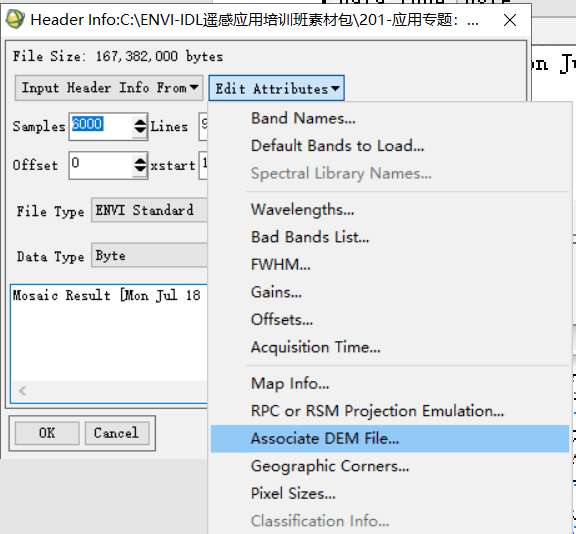
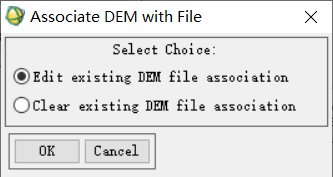
绑定影像方法
点击影像右键——编辑头文件——编辑属性——关联DEM影像
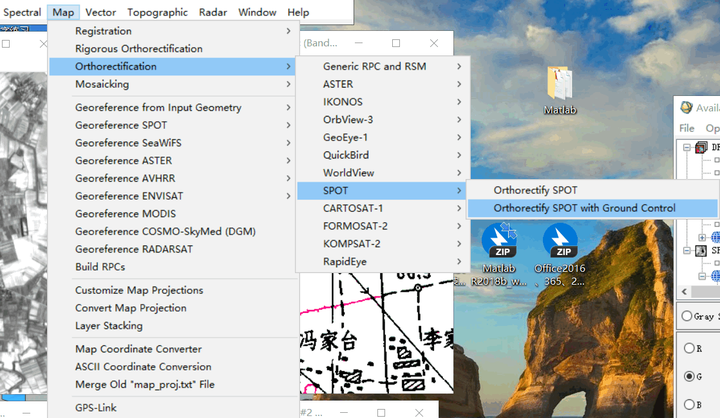
1.4 正射纠正(原图)
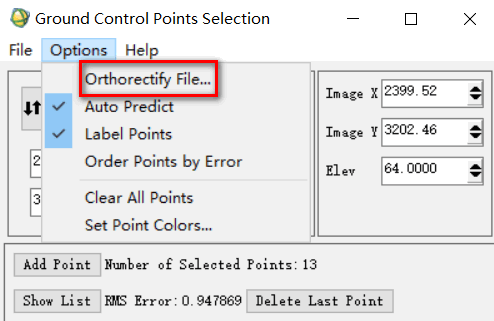
Map——正射——Spot——使用控制点
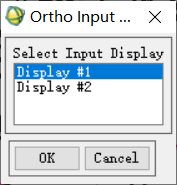
选择需要做正射的影像——#1
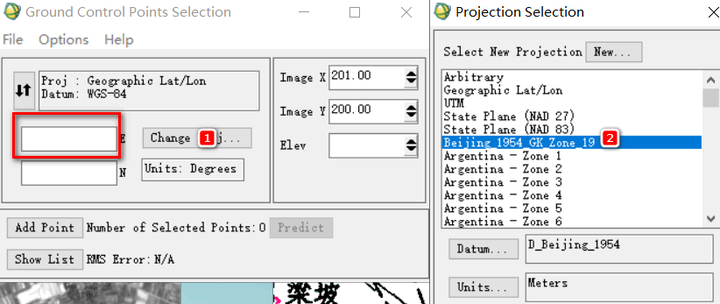
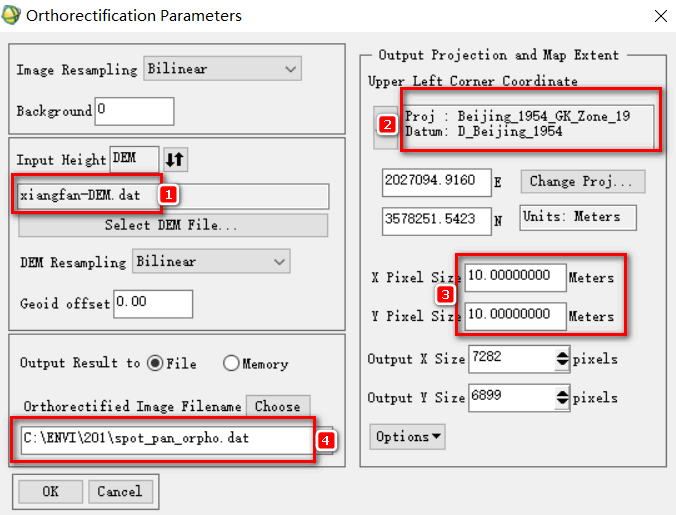
修改坐标系为北京1954
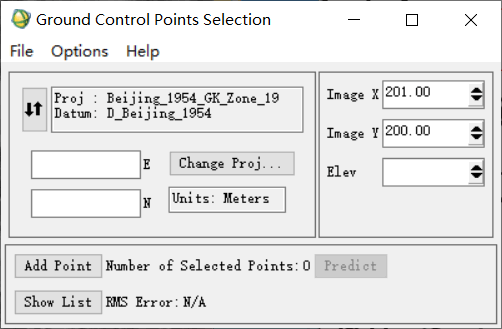
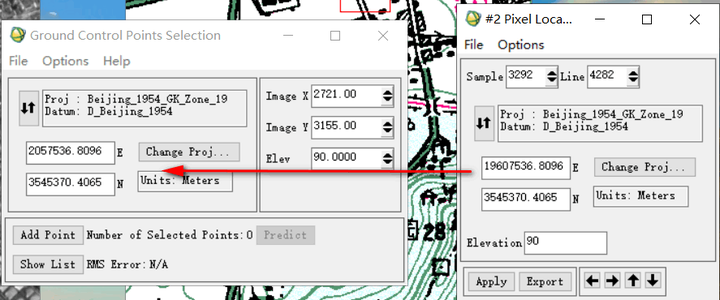
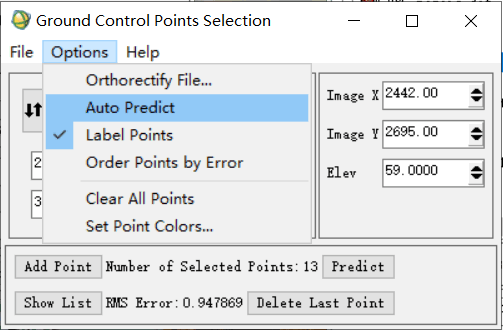
- 选择控制点
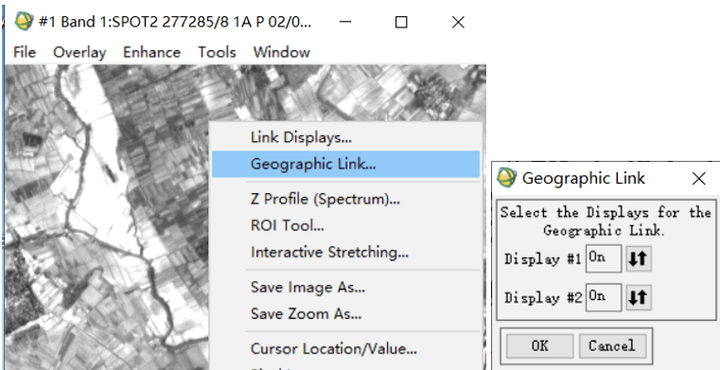
首先先为两幅图添加链接如下
点击图层右键——Pixel Locator
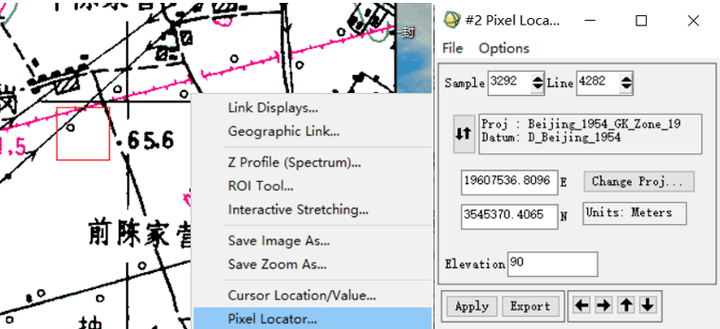
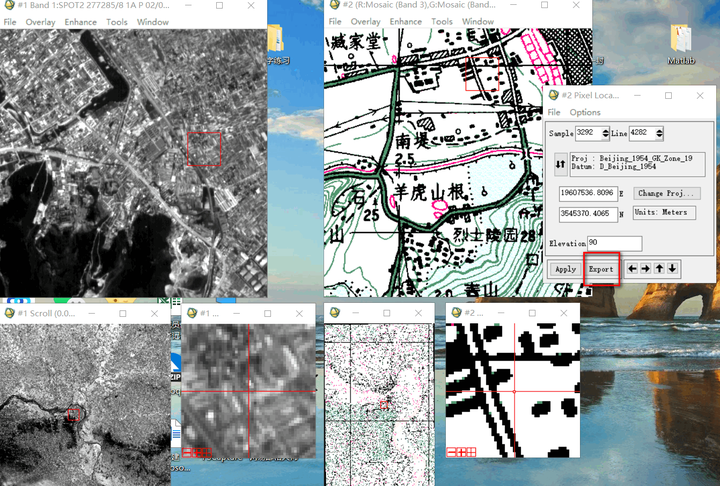
选好点后点击Export,可直接导入数据至选择控制点工具栏
点击Add Point,可添加好控制点
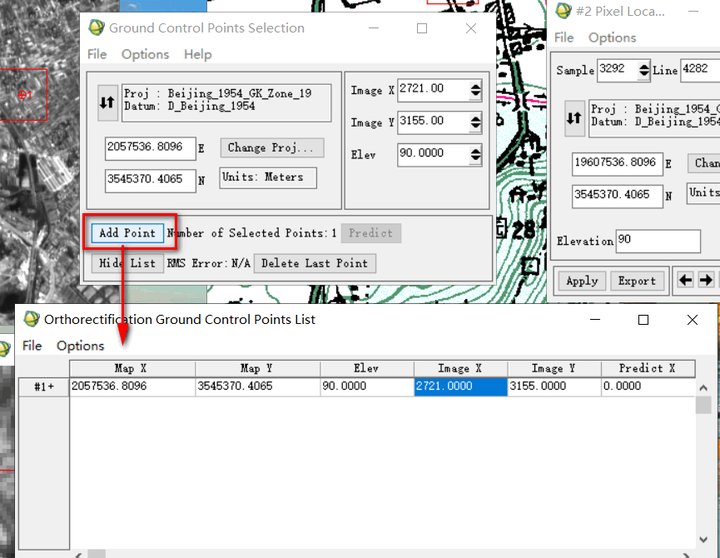
在这里我们导入已经找好的控制点
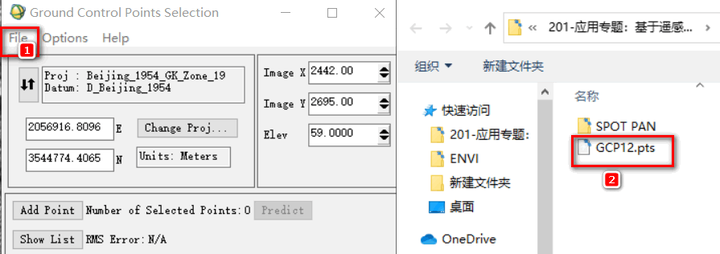
找好的控制点如下
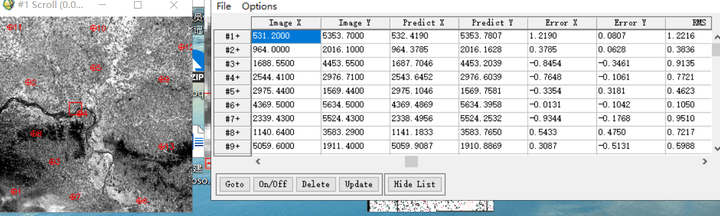
当找好一些点后可使用预测功能

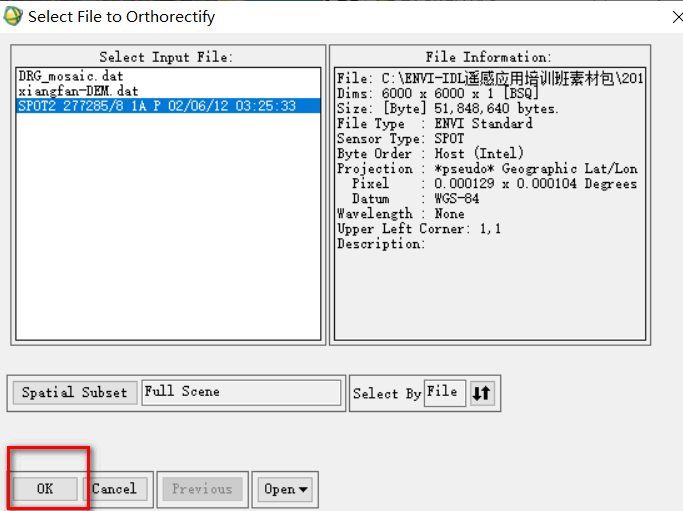
选择正射文件——SPOT2
设置正射校正参数,如下
正射完成,如下

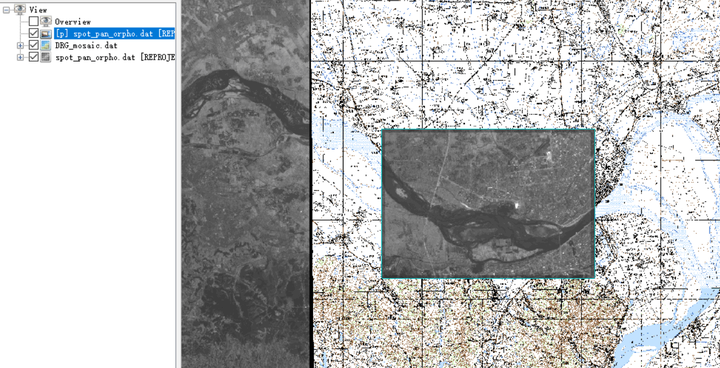
- 检查效果
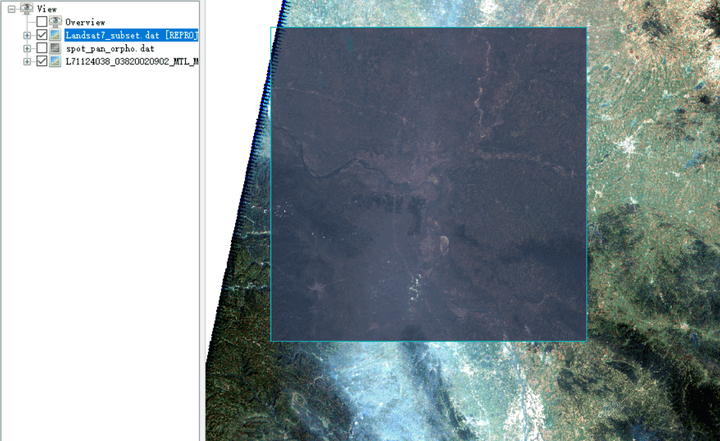
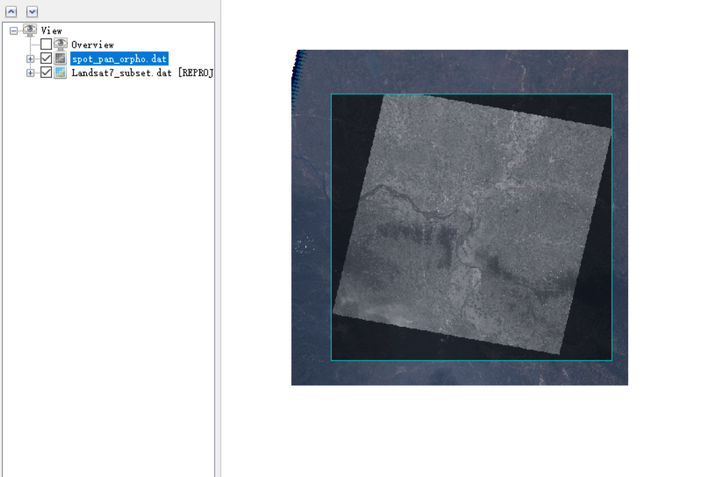
打开基础数据与正射校正数据
正射校正效果不错
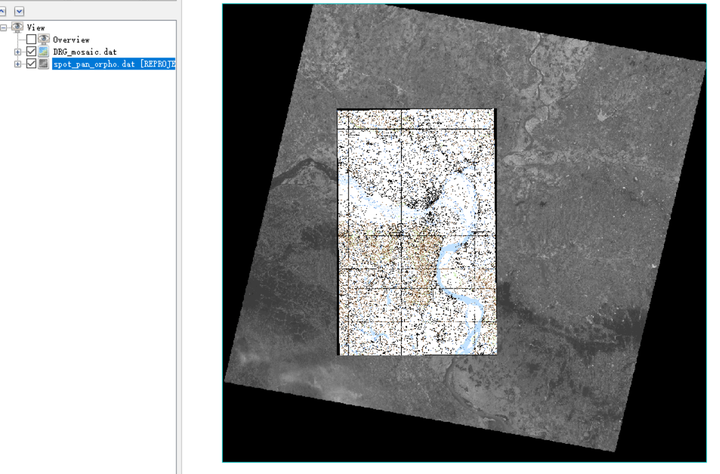
- Landsat7影像几何校正
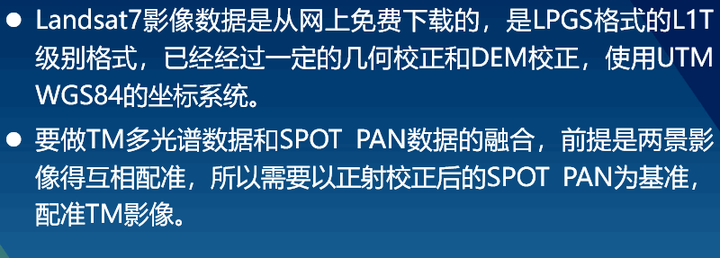
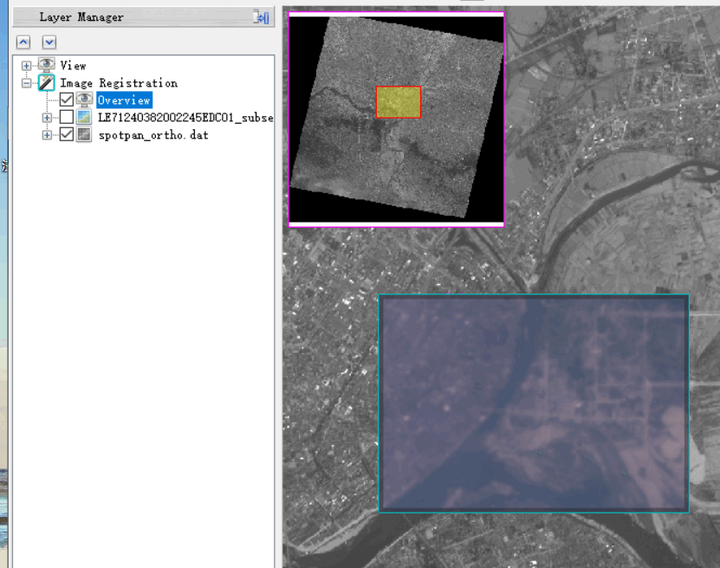
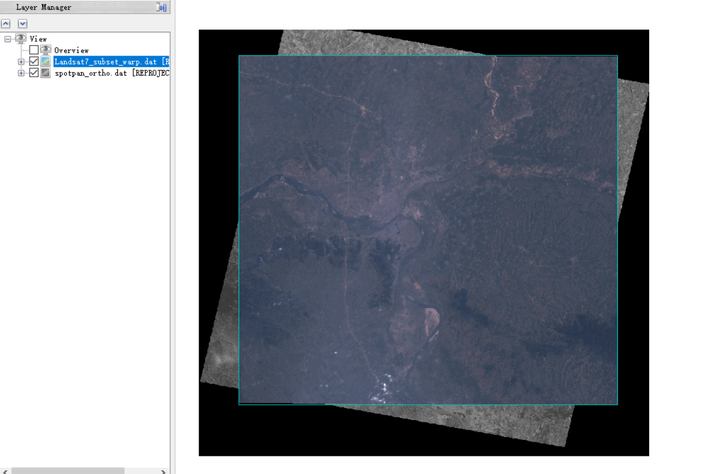
操作:TM和SPOT数据的图像配准
打开L7文件
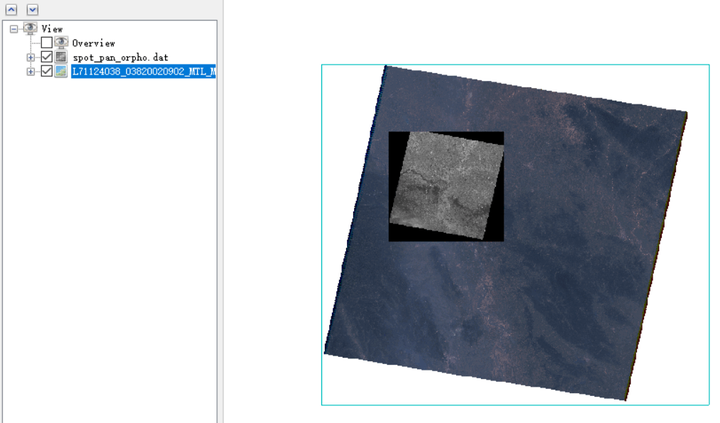
观察正射校正后的影像与L7影像。发现位置存在偏差,如下
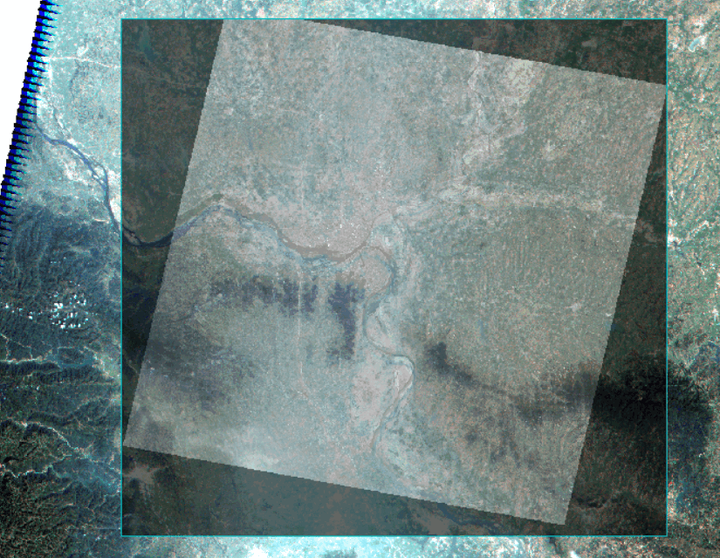
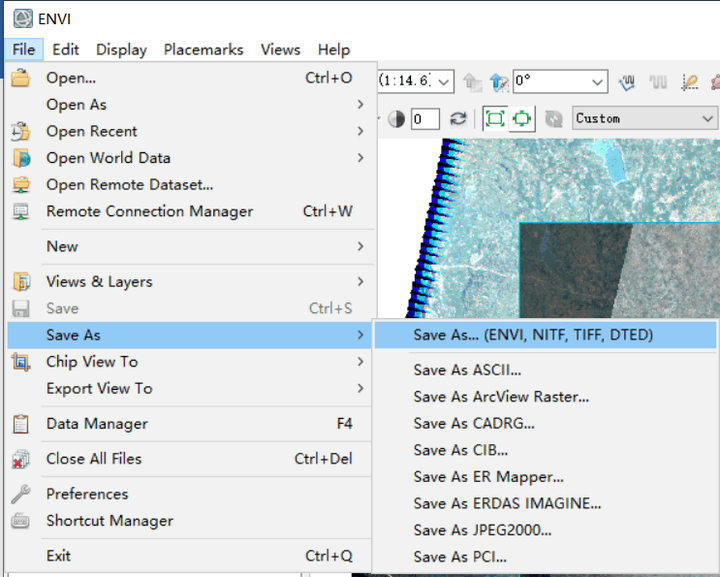
如上图可知L7文件过大,我们可裁剪需要校正的大致范围即可,点击Save As
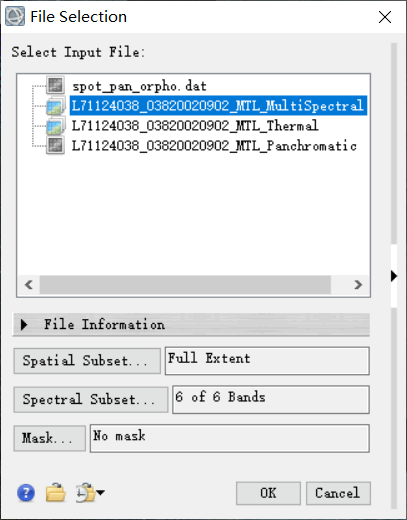
选择L7多光谱影像
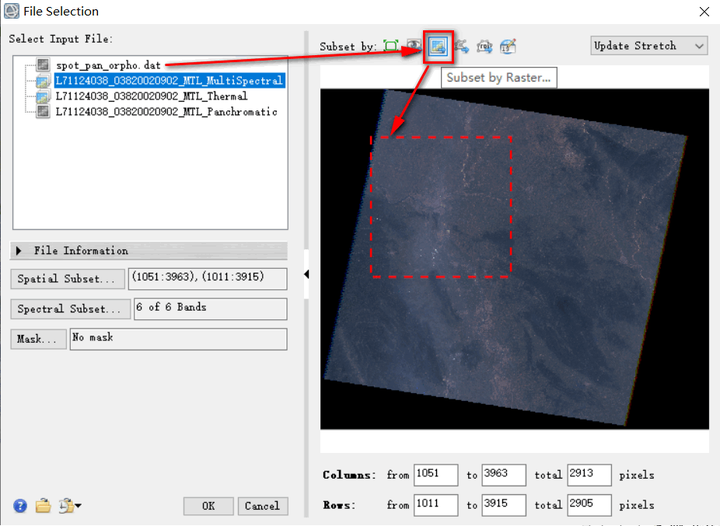
点击Subset by Raster,可确定大致需要做几何校正的范围
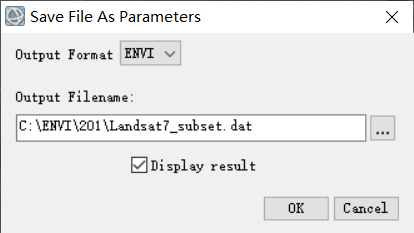
设置路径,保存即可
裁剪完成
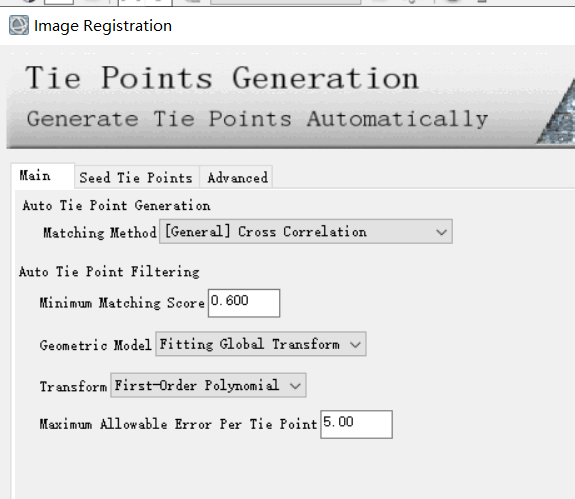
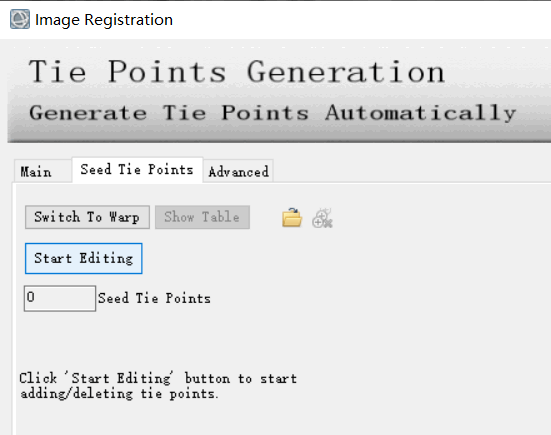
- 图像配准(打开配准工具栏)
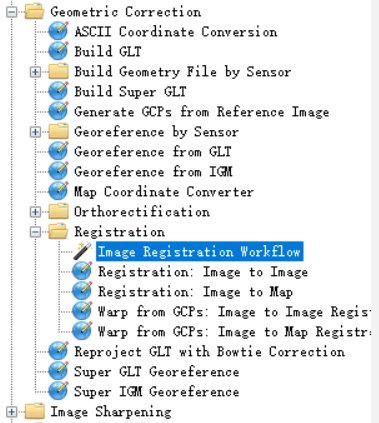
选择校正影像与被校正影像
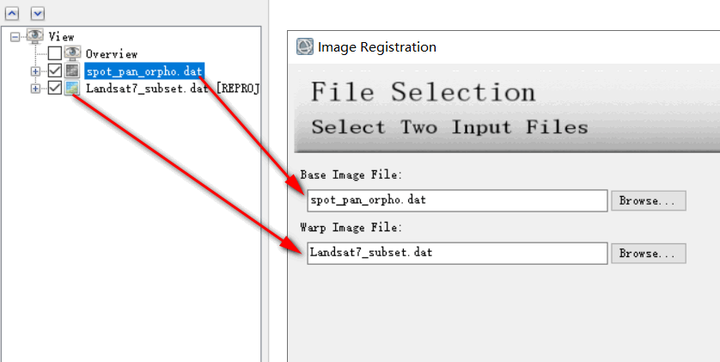
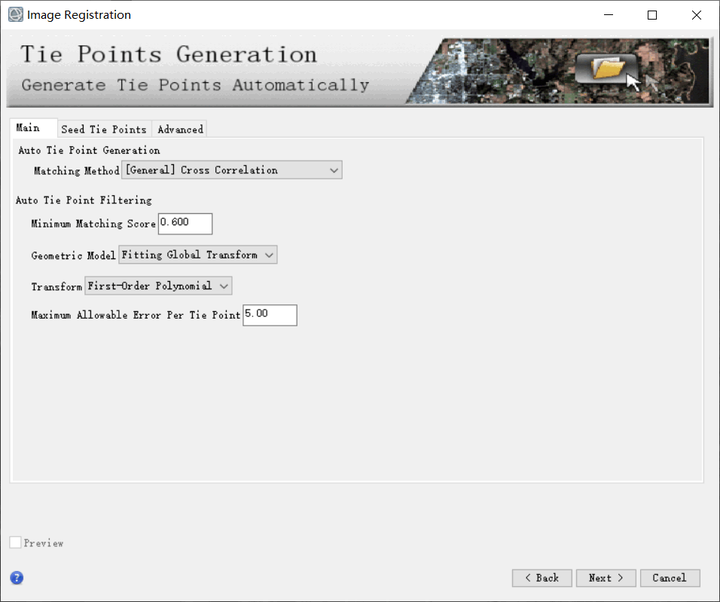
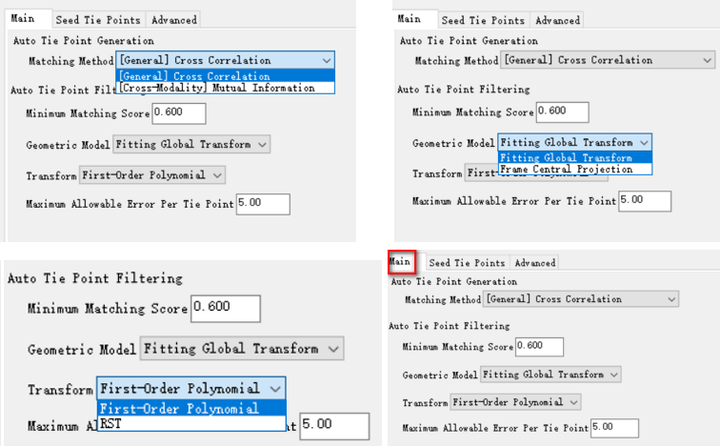
参数设置

- 重新手动配准
第一步
点击编辑
第二步
选中点后点击应用,如下
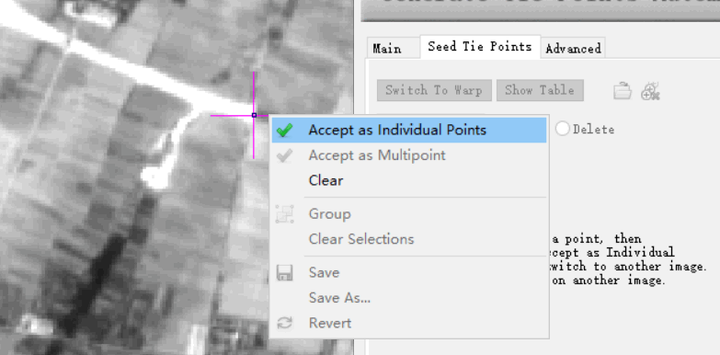
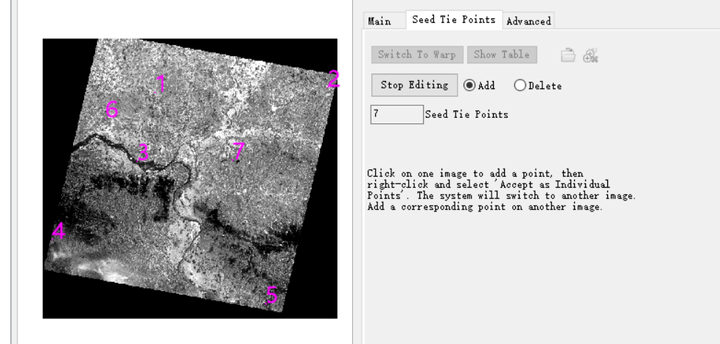
切换到了基准图,找好点,点击接受
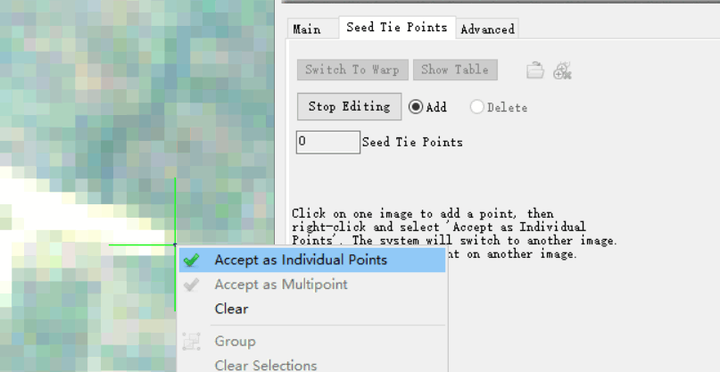
添加好了点一个点
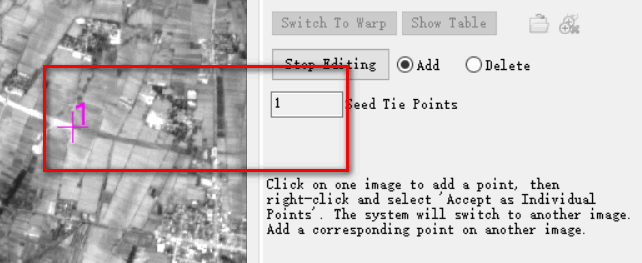
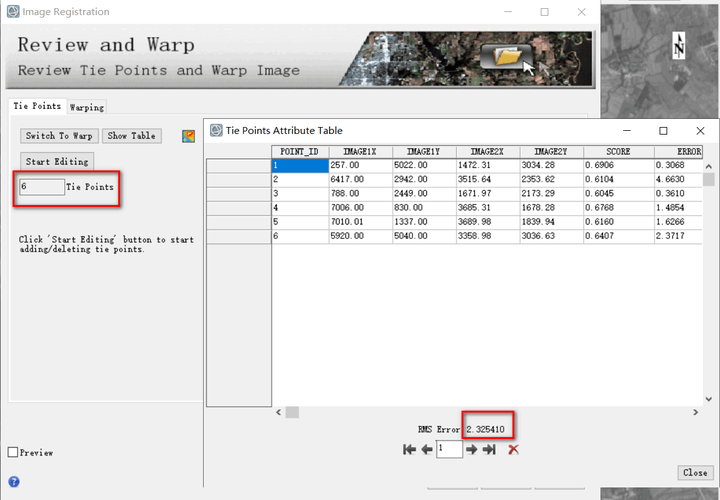
同样方法,找到7个点
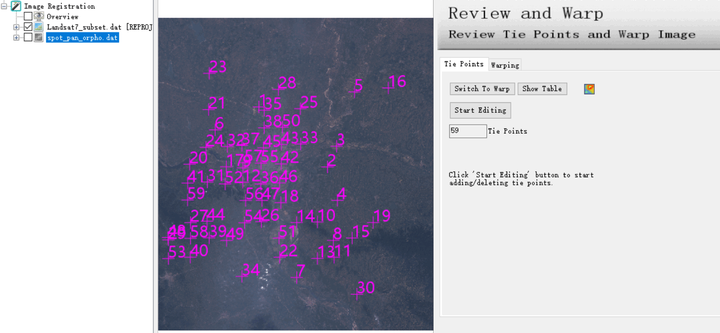
Next,自动配准点如下
删除误差较大点
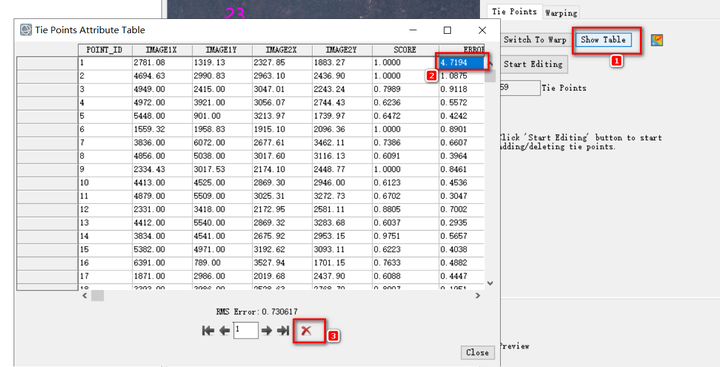
但一般来说奴会删除,误差大不代表精度不高
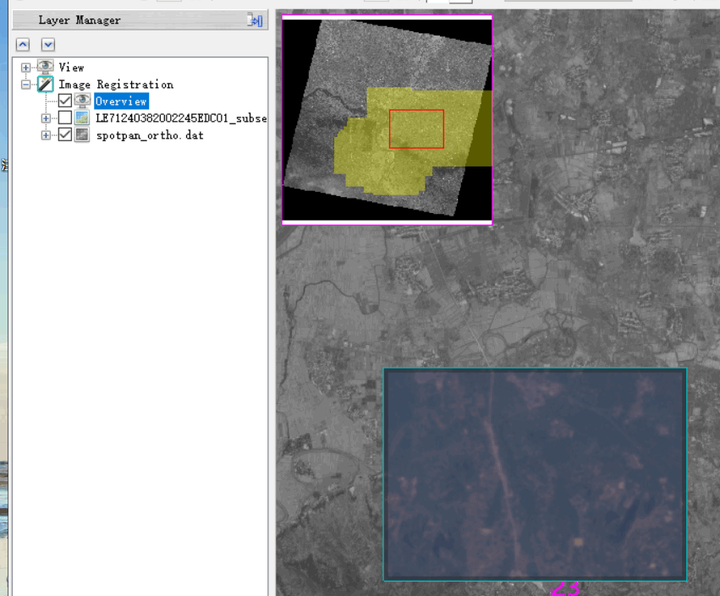
预览小妙招
点击overland——Clear Snail Trail
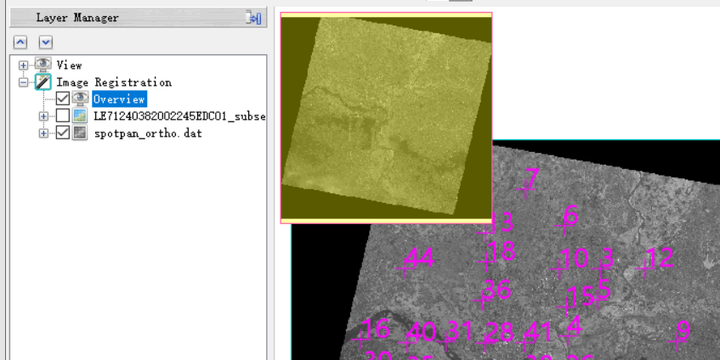
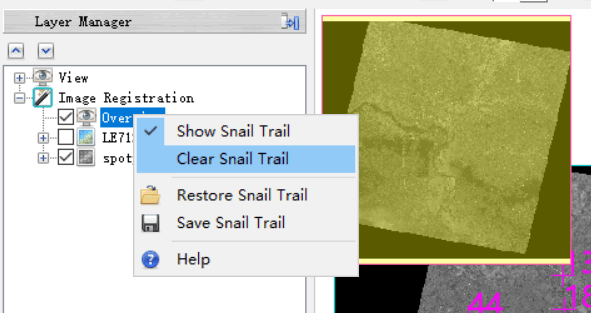
当我们预览过后会显示痕迹
输出
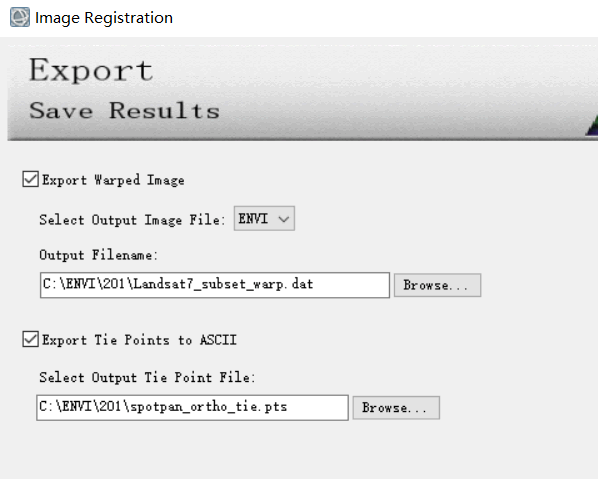
配准完成
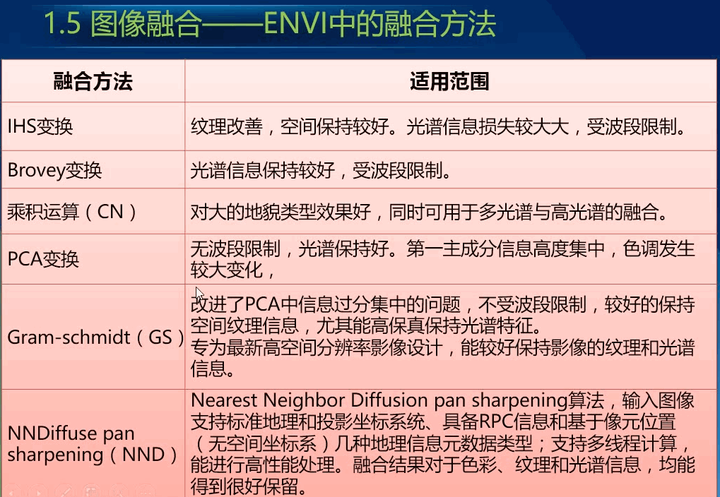
1.5 图像融合
操作:SPOT2和TM数据的图像融合
- 内容:
- 进行SPOT2 的10米全色波段和Landsat TM30米多光谱的融合操作,学习ENVI的融合操作流程
- 数据:
- 201-专题:基于遥感的自然生态环境监测\3-TM-SPOT图像融合
选择图像融合工具
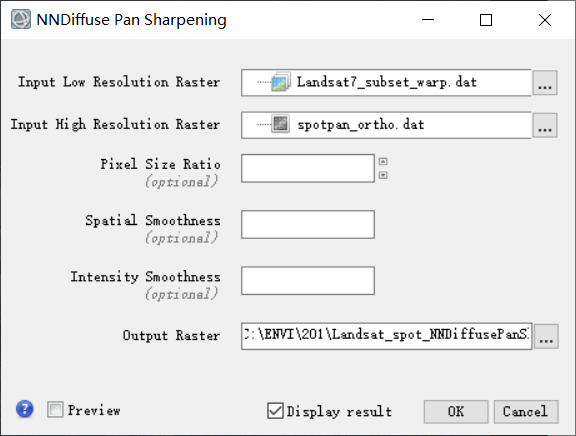
设置输入文件
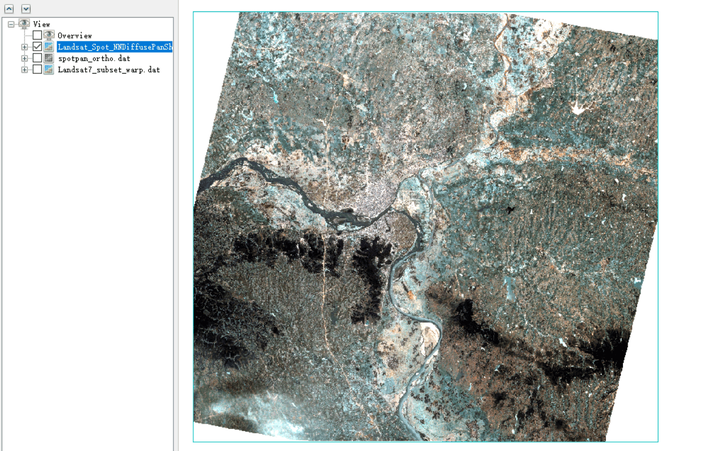
融合完成
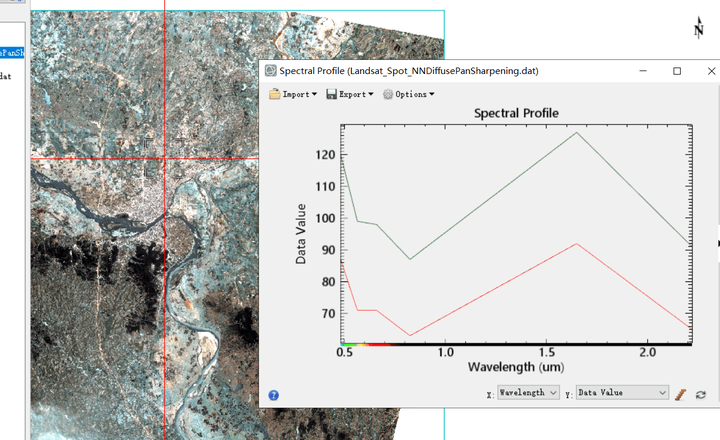
光谱查看
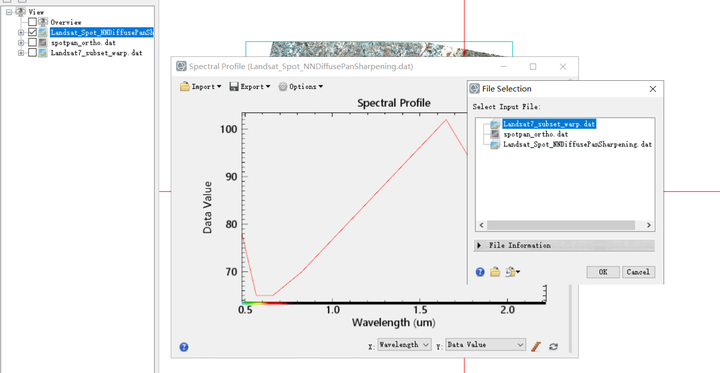
值的范围变换如下
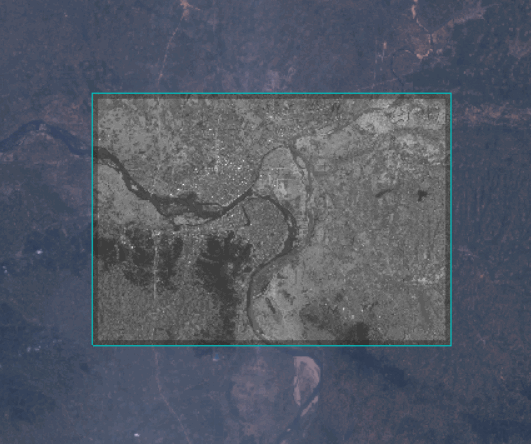
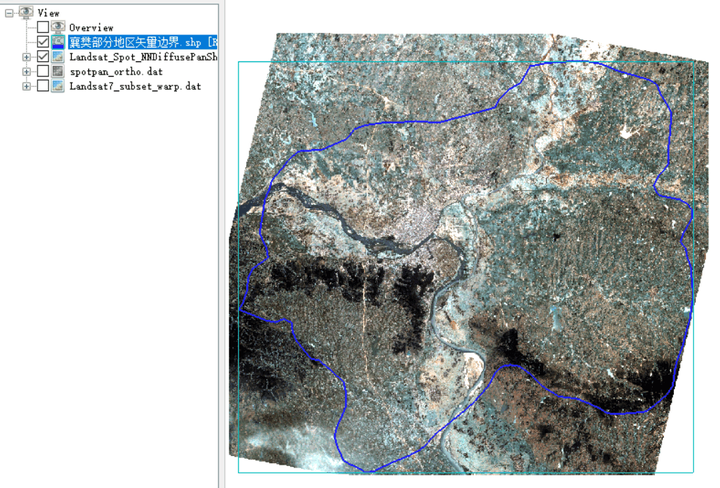
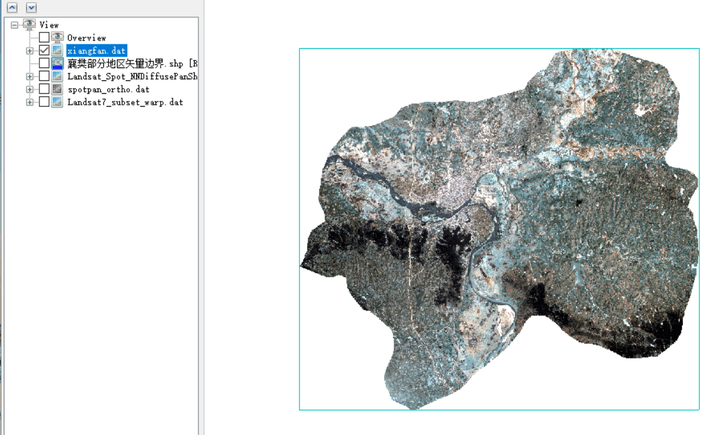
1.6 图像融合图像裁剪
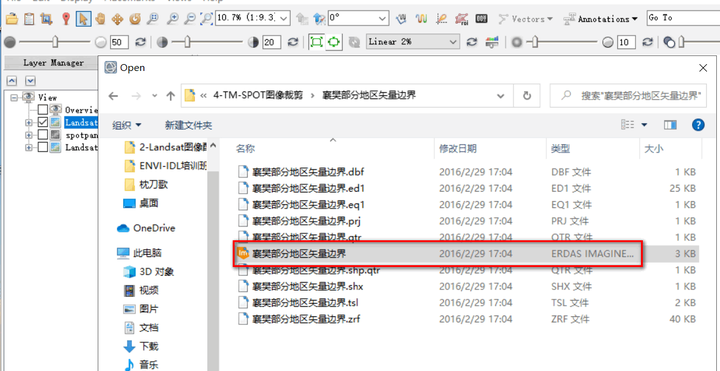
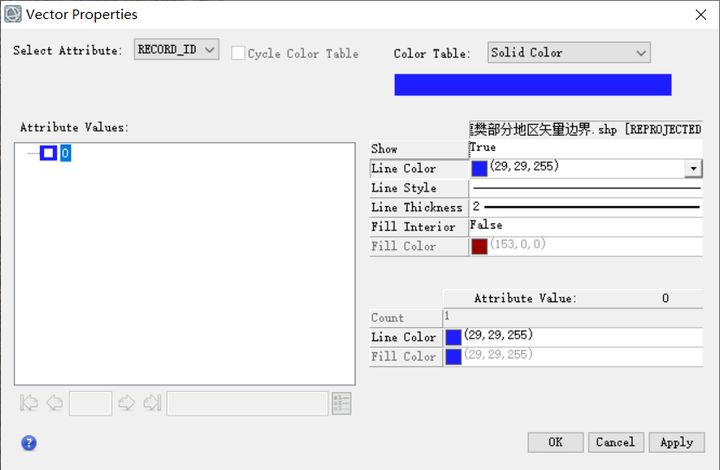
打开矢量范围文件
可以更改属性(矢量文件)
打开矢量裁剪工具
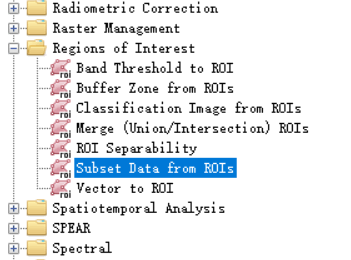
选择需要裁剪的数据(融合好的影像)
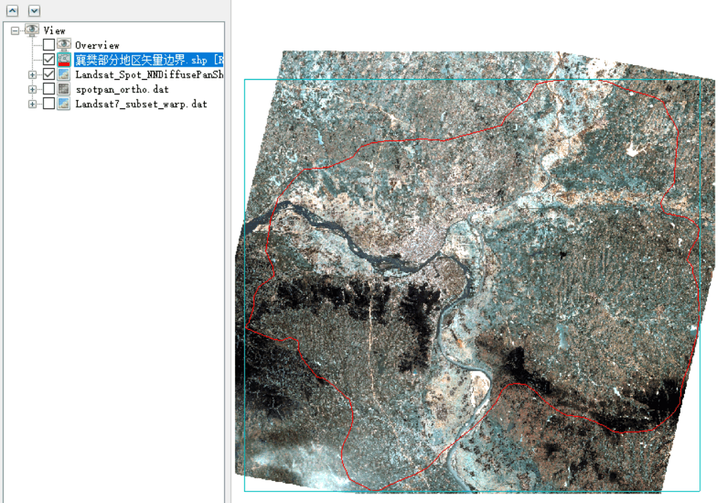
利用空间子集选择裁剪的边界
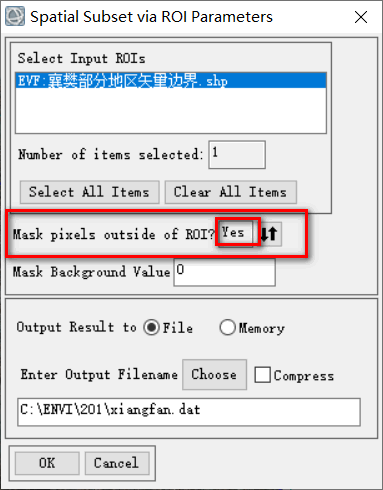
裁剪后的影像,如下
四、生态环境评价
2.1 处理流程
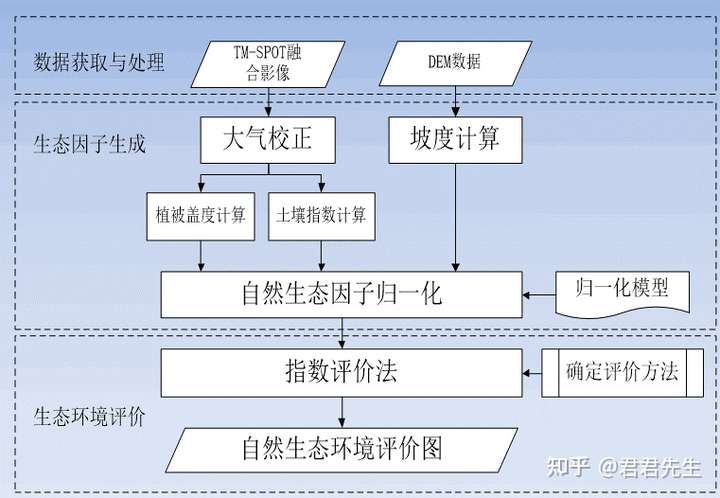
流程说明
- 数据
- 已经过预处理的TM-SPOT融合影像和DEM数据。
- 生态因子选取
- 对经过预处理的数据进行快速大气校正。
- 本专题选取植被、土壤、地形三个最基本的要素作为评价区域自然生态环境的生态因子。
- 以“植被覆盖度”和“土壤指数”作为植被和土壤的生态因子,“坡度”作为地形因子。统一将这些生态因子进行归一化处理。
- 自然生态环境评价方法
- 本专题选择的是指数法与综合指数法。
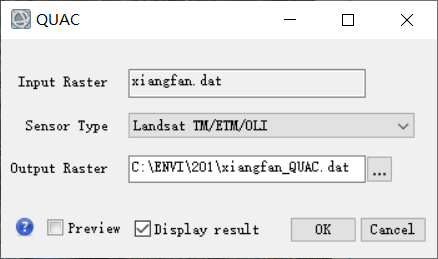
2.2 大气校正
打开快速大气校正工具
选择工具,选择文件后输出
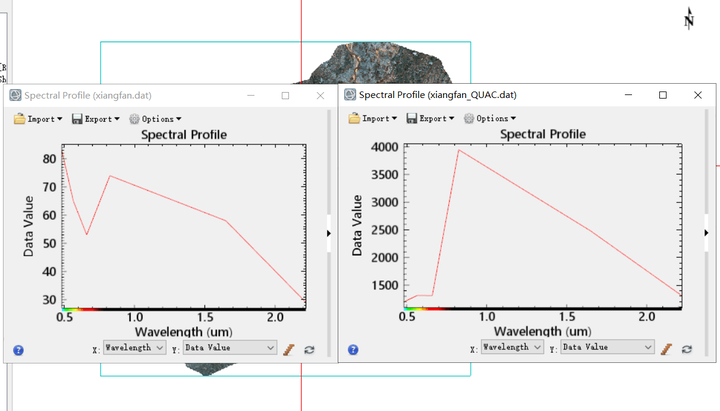
查看光谱变换变化
2.3 生态因子生成 — 植被覆盖度
植被覆盖度是根据前人研究的NDVI估算模型
-
- FC=(NDVI-NDVImin)/(NDVImax-NDVImin)
- 其中,NDVI是归一化指标指数,NDVImax表示区域最大NDVI值,NDVImin表示区域最小的NDVI值。
- 由于图像中不可避免的存在着噪声,NDVImax和NDVImin并不一定是最大NDVI值和最小的NDVI值,可以根据直方图分别取两头“拐点处”的值。
- FC=(NDVI-NDVImin)/(NDVImax-NDVImin)
计算NDVI
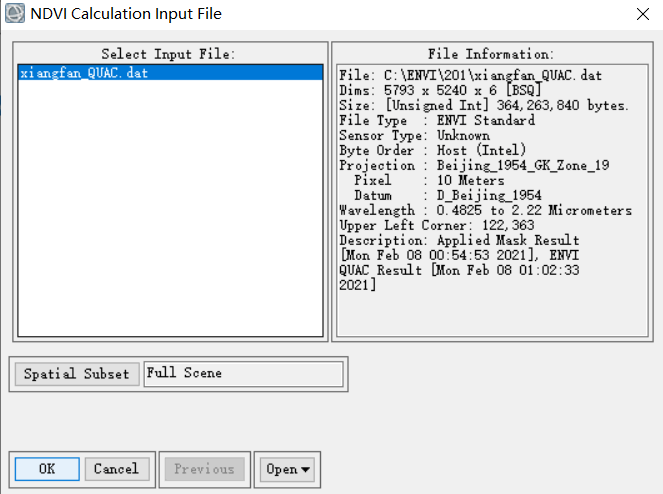
选择对应波段
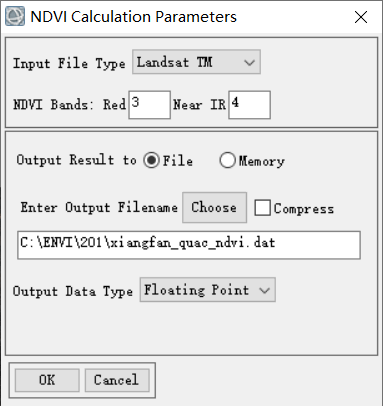
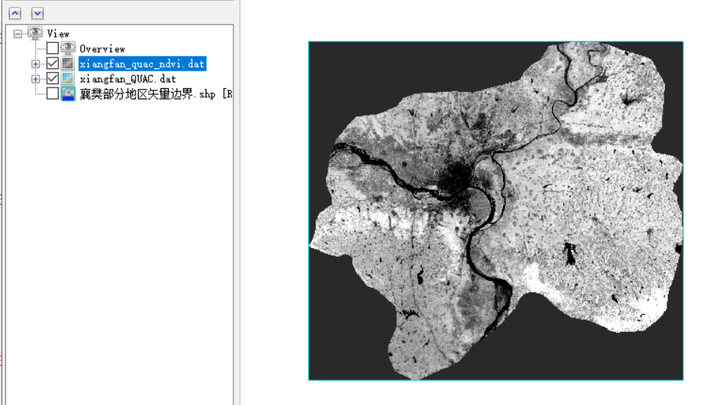
NDVI计算完成
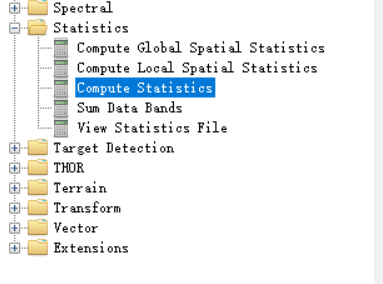
统计最小NDVI
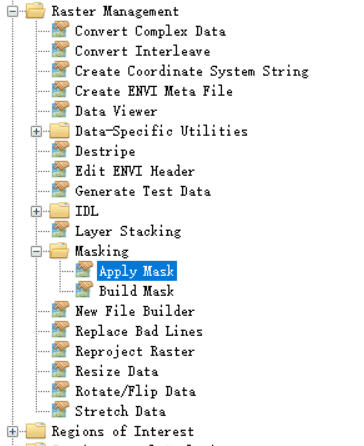
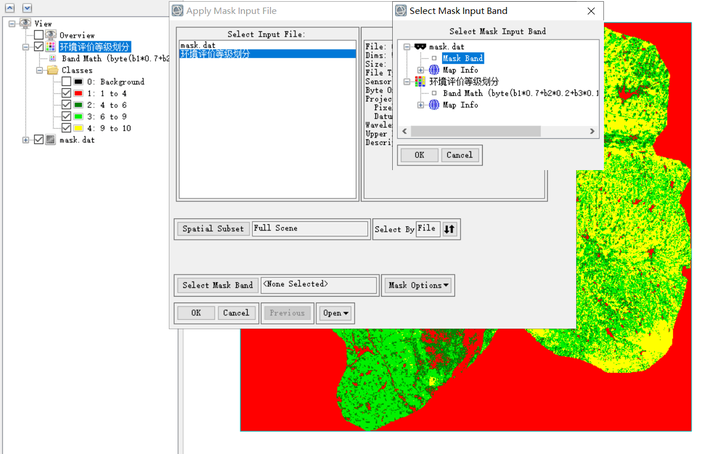
建立掩膜
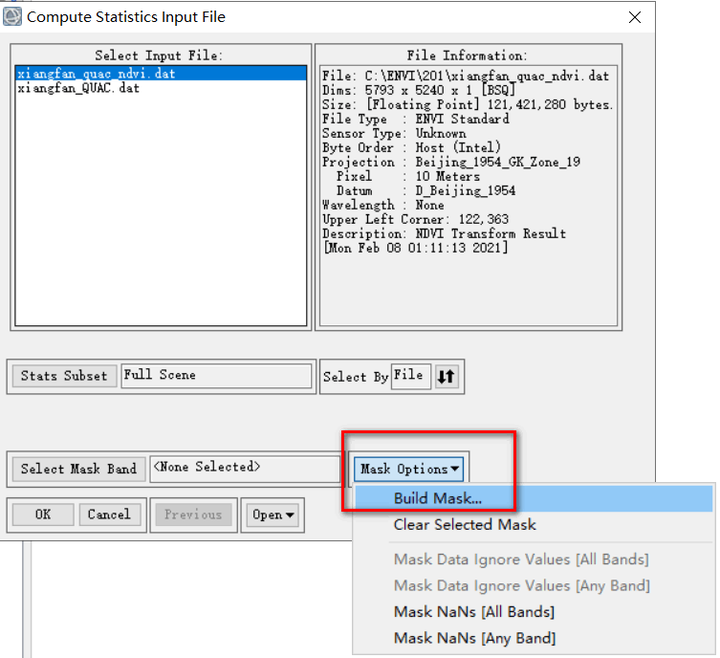
选择NDVI——Import EVFs
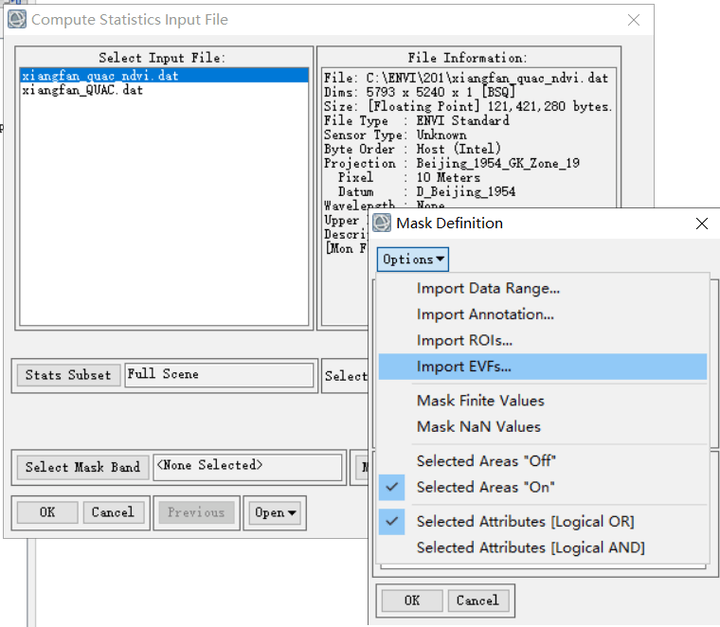
选择矢量文件
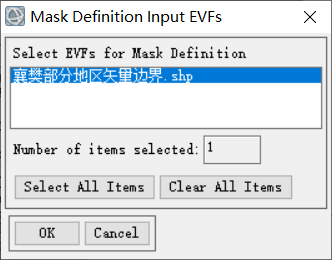
选择NDVI,打开选择区域
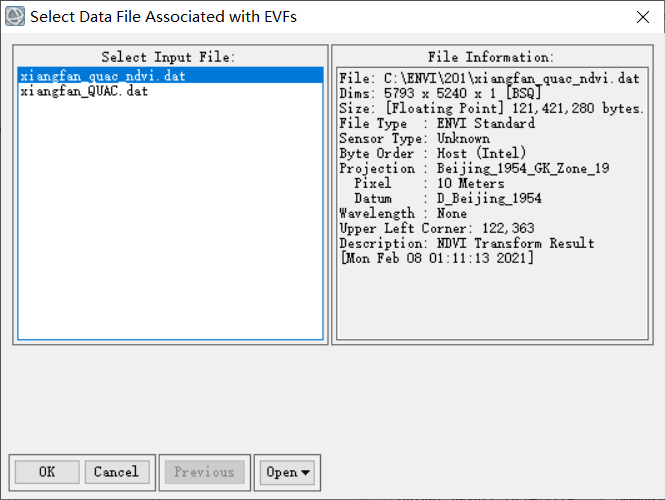
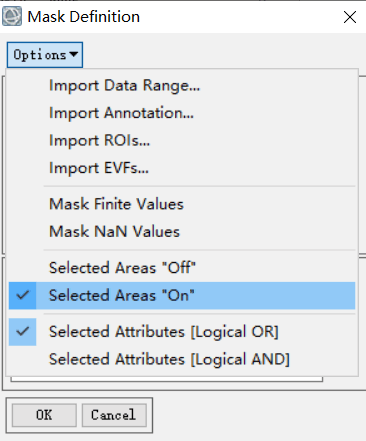
掩膜文件选择矢量文件
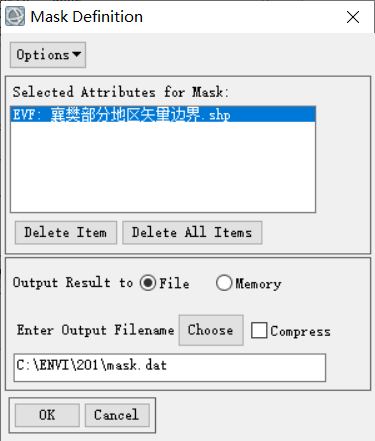
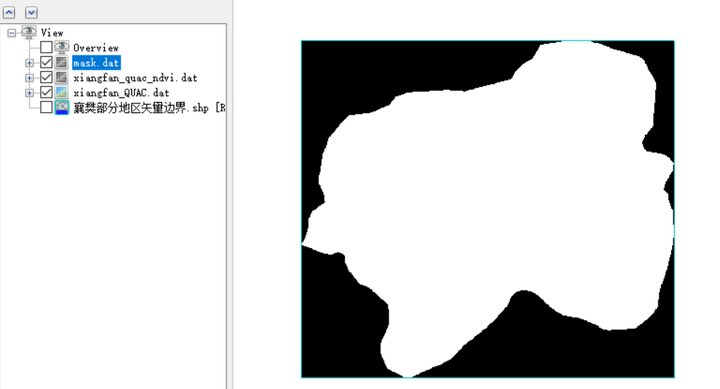
掩膜完成
点击继续,进行统计
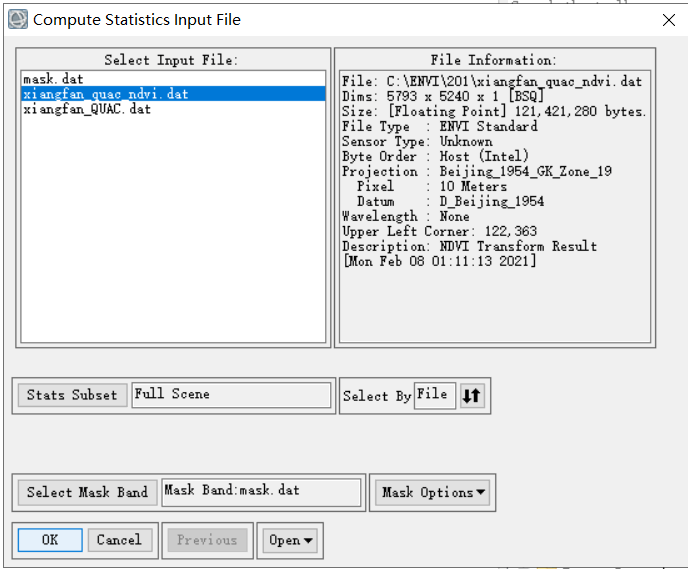
选择直方图统计
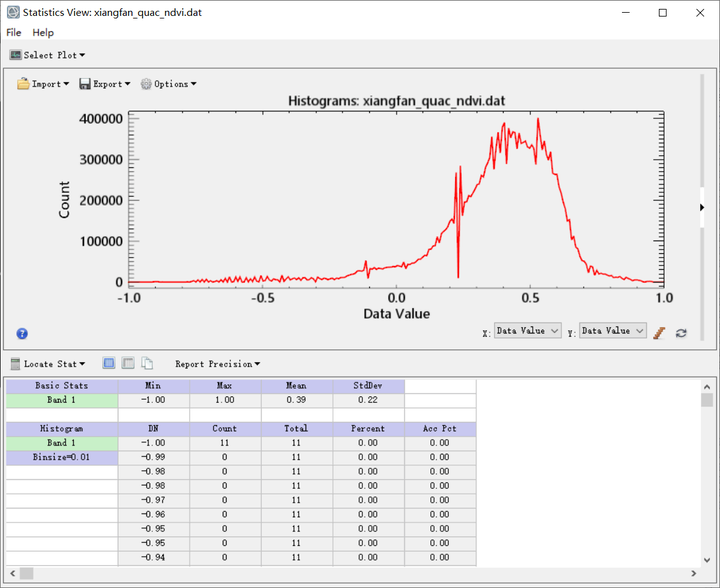
-0-04 5
0.65 95
Ndvi<-0.04=0
-0.04<Ndvi<0.65
Ndvi>0.65=1
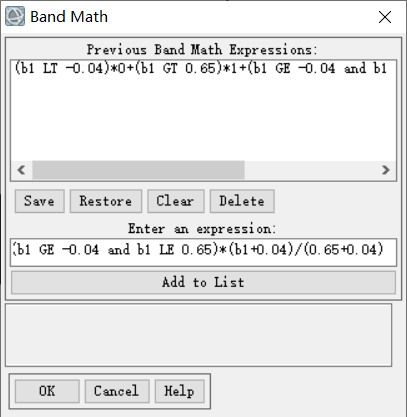
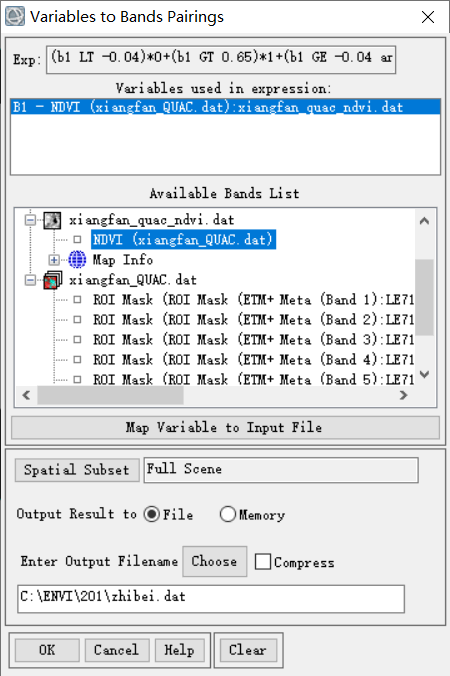
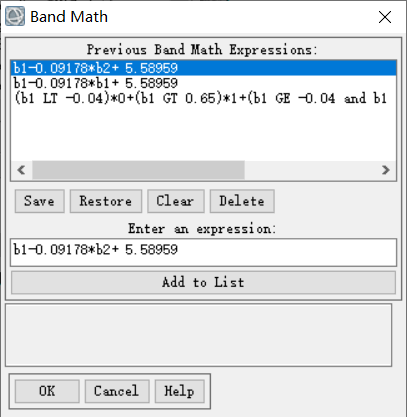
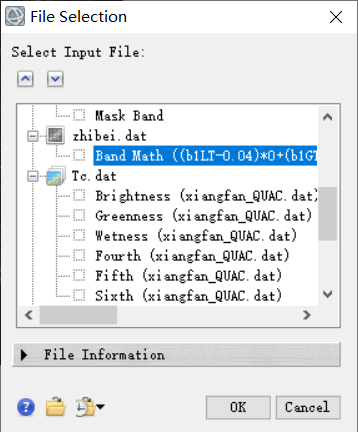
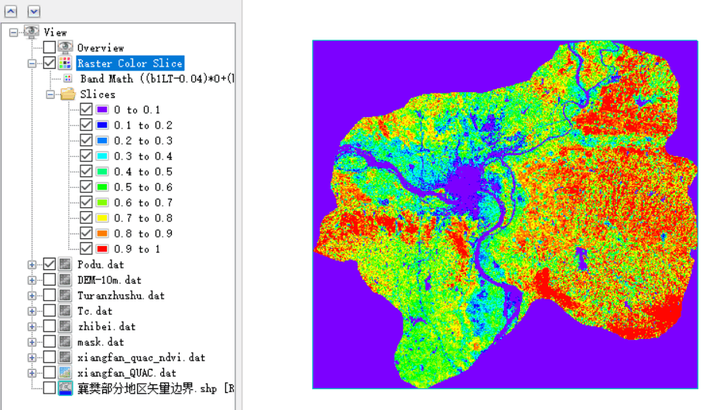
(b1 LT -0.04)*0+(b1 GT 0.65)*1+(b1 GE -0.04 and b1 LE 0.65)*(b1+0.04)/(0.65+0.04)
- 进行波段运算,如下
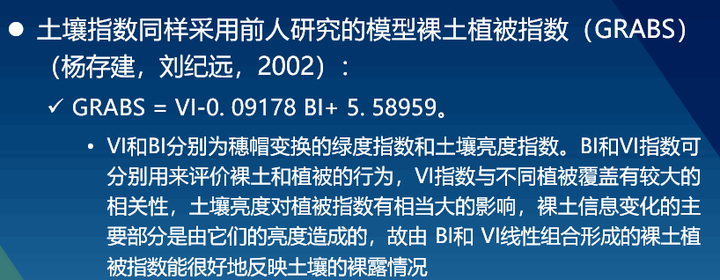
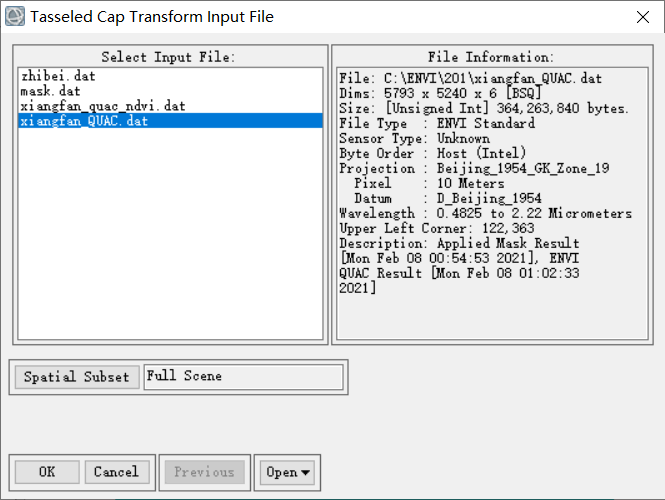
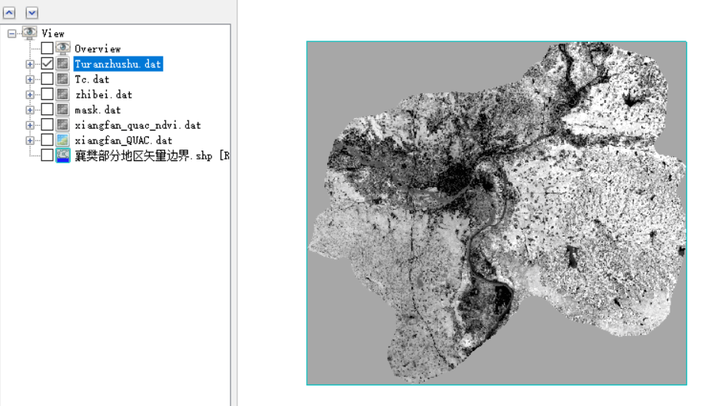
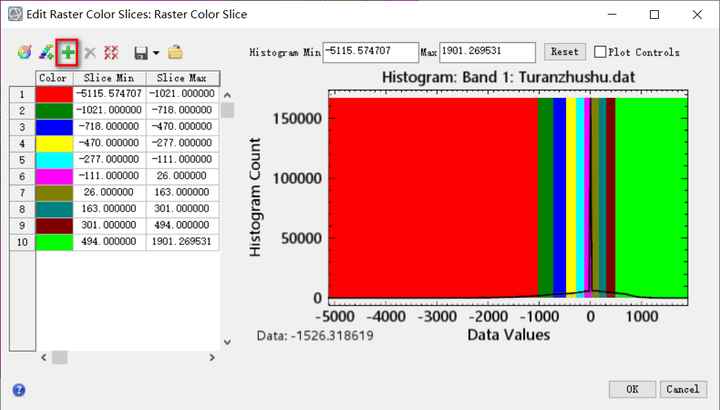
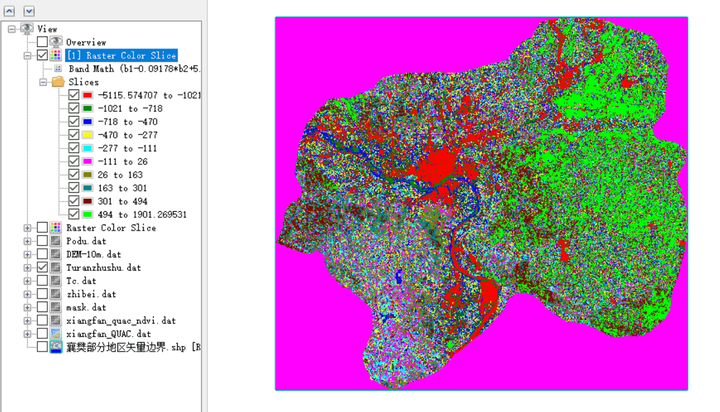
2.3 生态因子生成 — 土壤指数
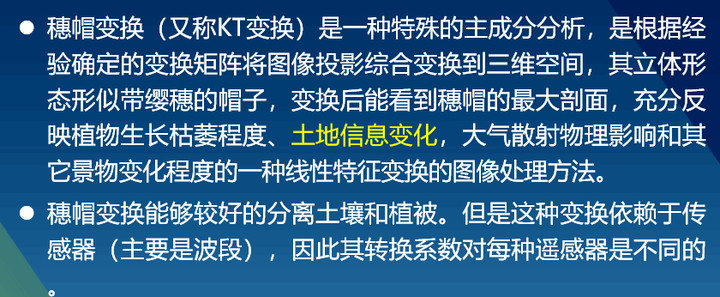
打开缨帽变换工具
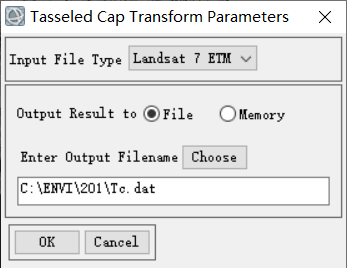
完成
查看信息
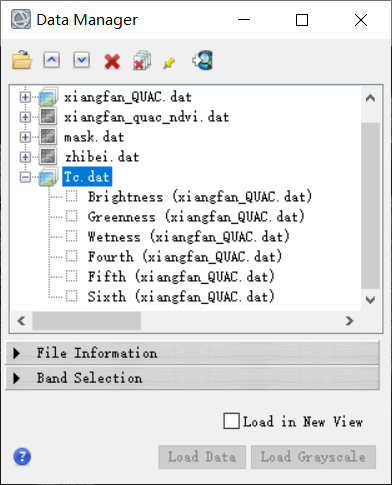
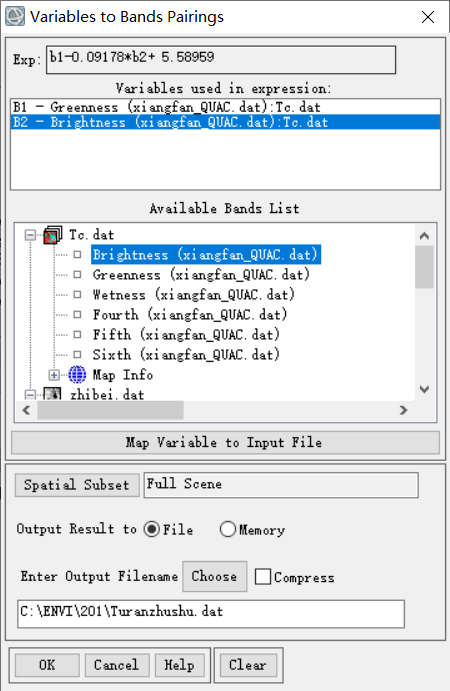
进行波段计算
(b1-0. 09178)*(b2+ 5. 58959)
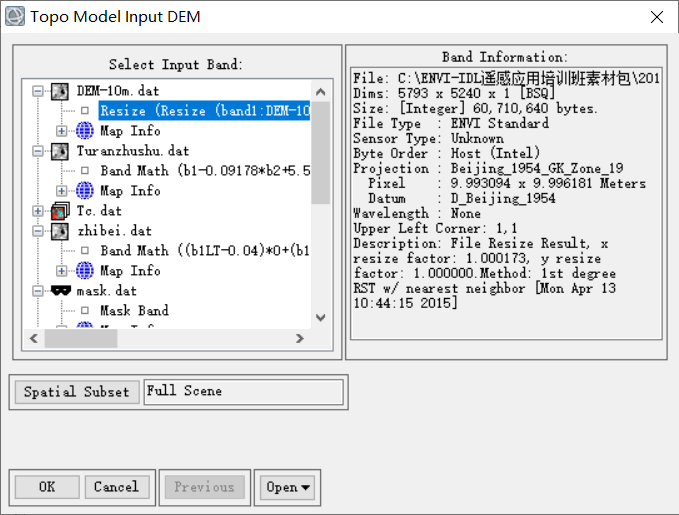
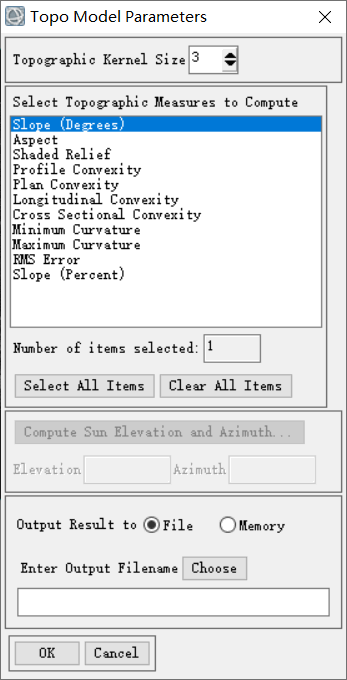
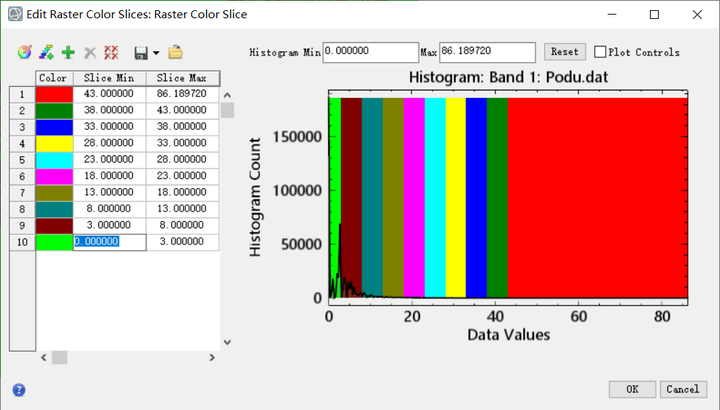
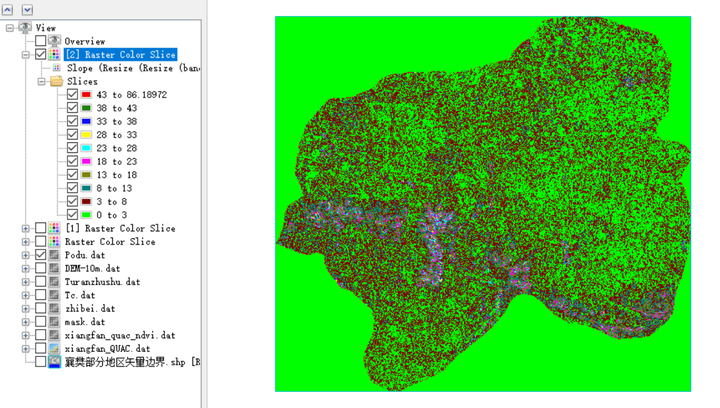
2.4 生态因子生成 — 坡度
将30m的DEM重分类为10m的DEM
计算坡度
2.5 生态因子归一化
- 评价因子生成之后,直接用它们去进行评价是比较困难的,因为各指标项的量纲不一致, 所以没有可比性。
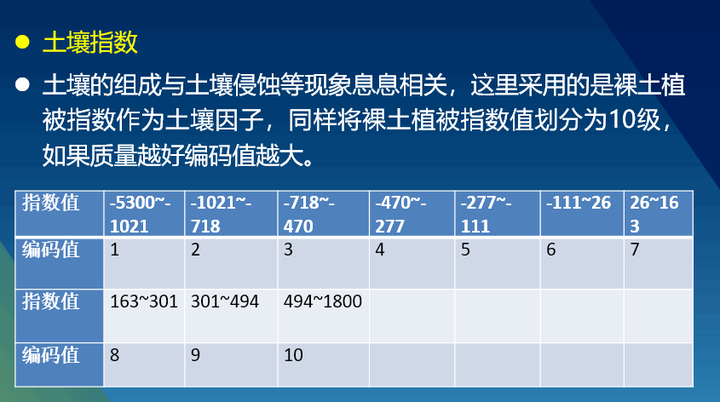
- 各指标的量化分值依其对生态环境质量的贡献程度, 采用统一顺序原则, 即按照它们对生态环境正向影响的大小,从高到低分为若干级,对环境质量贡献越大,编码值越大,反之则编码值越小。
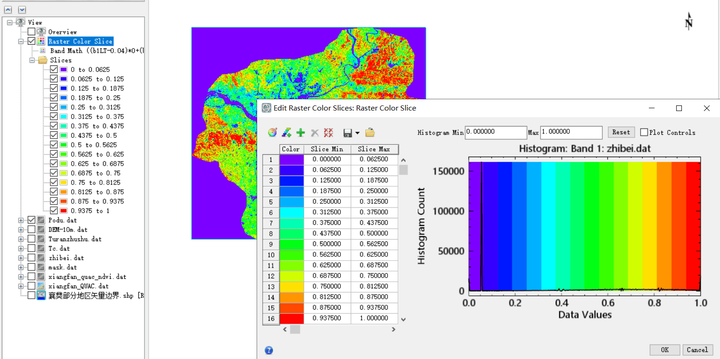
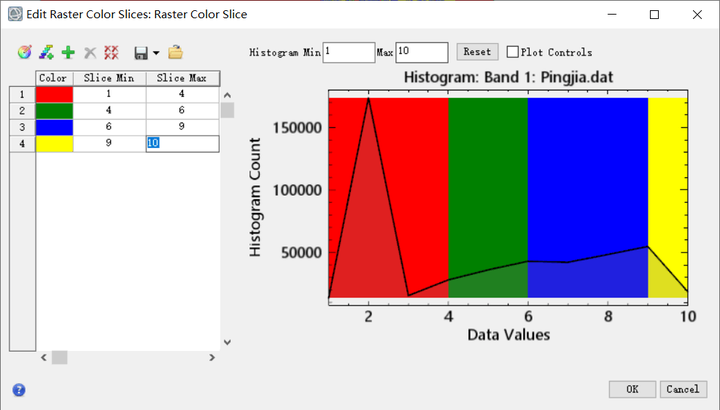
- 各个参评因子数据经过归一化化后是一组反映其属性特征的数值,其值介于1~1 0 之间。

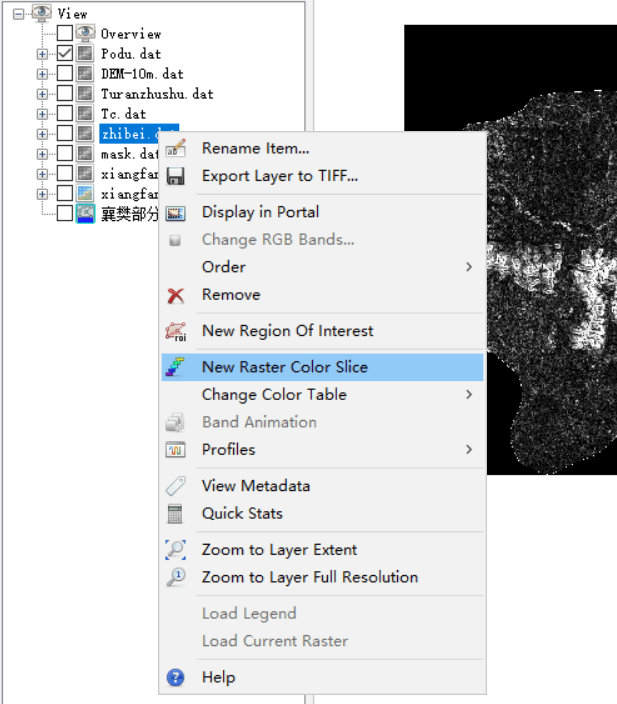
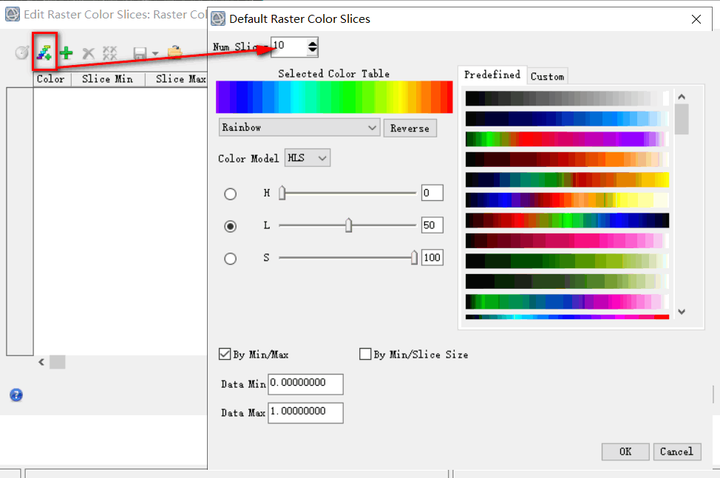
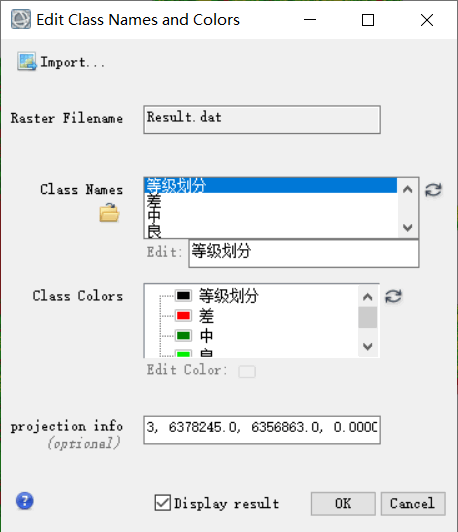
添加色带以及分级
土壤指数分级标准
地形因子分级标准

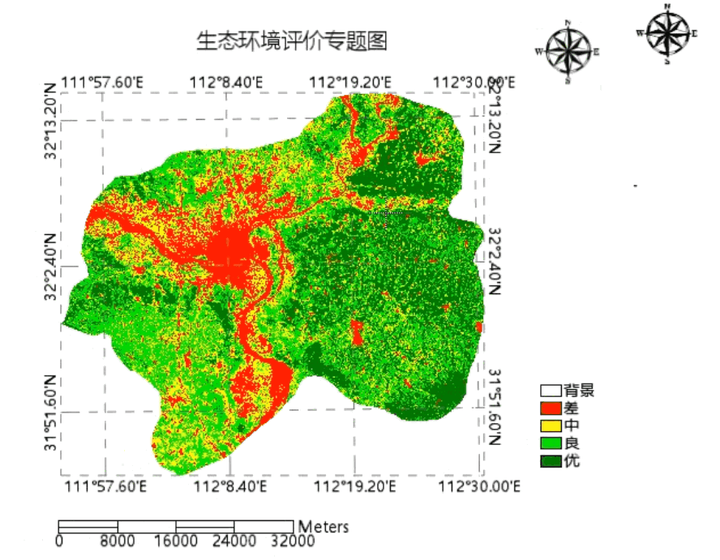
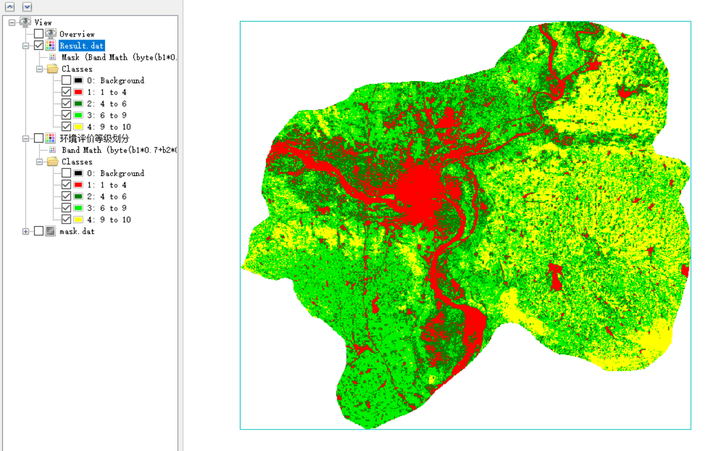
2.6生态环境评价
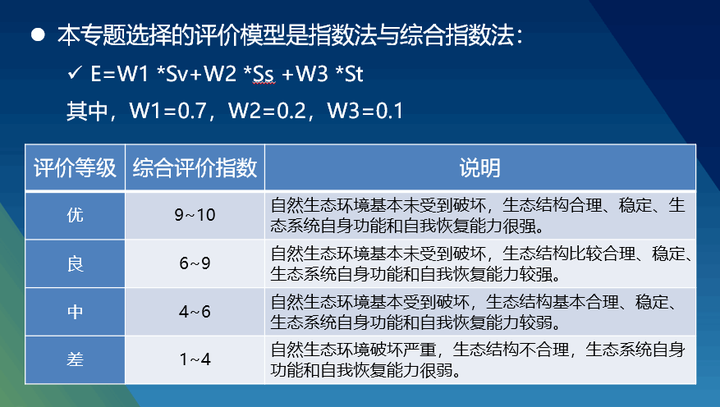
波段计算(生态评价占比)
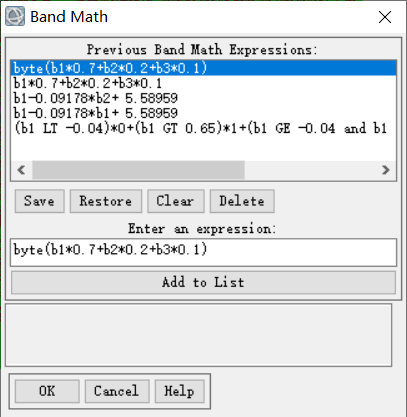
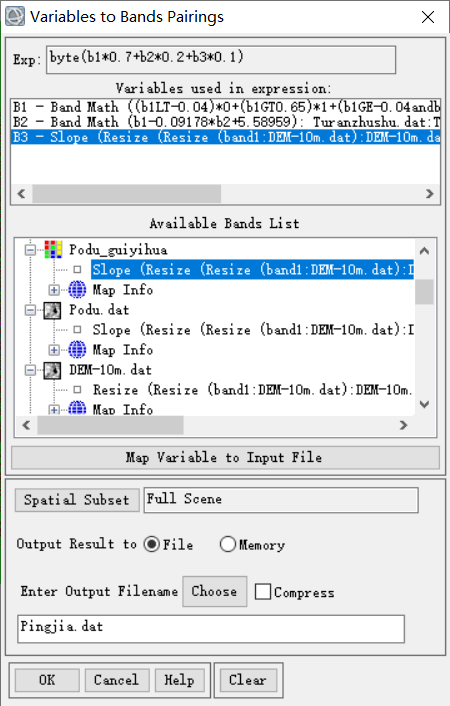
完成
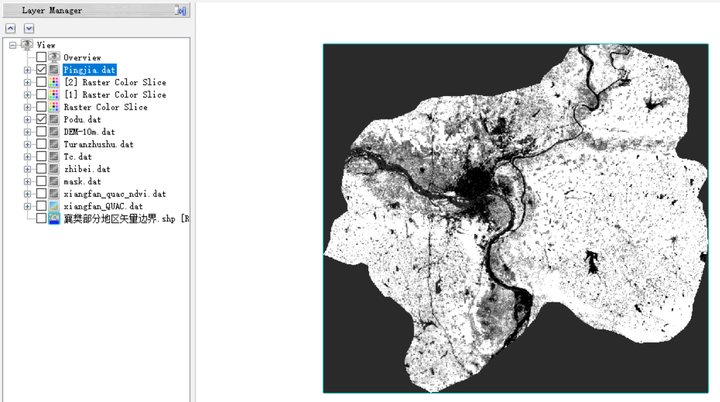
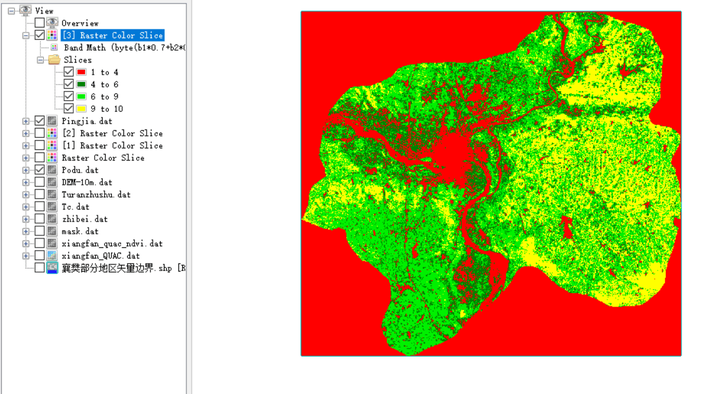
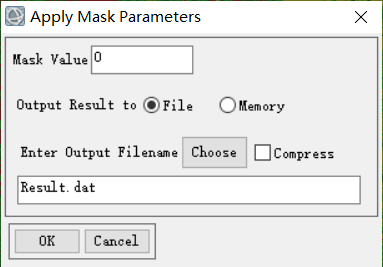
对背景处理
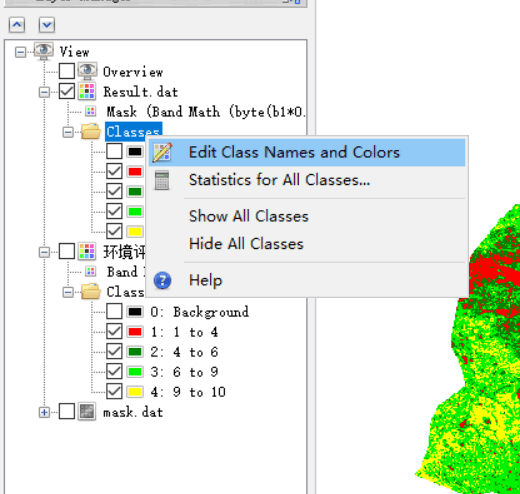
编辑色带
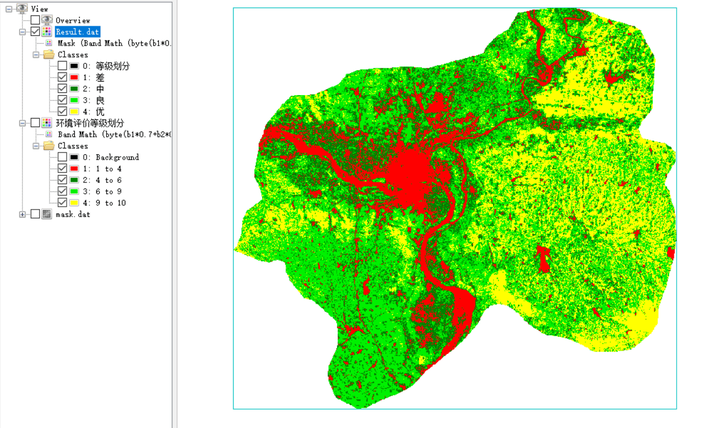
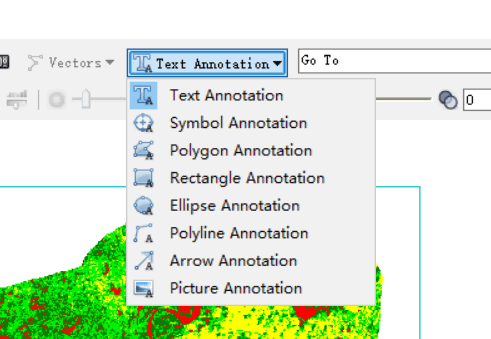
添加专题要素(指北针、格网、标题等)