
- 首 页
- 数据产品
-
土地利用遥感监测数据 点击更多
全球高精度土地利用数据服务 全国作物类型空间分布数据服务 二级分类土地利用数据30m 高精度植被类型分布数据 全国城市功能区划分布数据 全国DEM高程数据服务 全国耕地数据空间分布服务 全国林地分类数据空间分布服务 全国草地类型分类数据空间分布服务 全国水体数据空间分布服务 全国建设用地数据空间分布服务 全国未利用地数据空间分布服务 地形、地貌、土壤理化性质数据服务 全国坡度坡向数据服务 一级分类土地利用数据30m
全国气象气候数据服务 点击更多
全国降水量空间分布数据集 全国气温空间分布数据集 太阳辐射量空间分布数据集 全国气象站点观测数据集 全国平均风速空间分布数据集 全国平均水汽压空间分布数据集 全国蒸散量空间分布数据集 全国日照时数空间分布数据集 全国相对湿度空间分布数据集 全国地表温度空间分布数据集 全国气候区划空间分布数据集 全国气象站点空间分布数据集 全国土壤湿度空间分布数据集 全国水文站点地表径流量空间分布数据集
土壤理化性质数据服务 点击更多
土壤类型空间分布数据服务 土壤质地空间分布数据服务 土壤有机质空间分布数据服务 土壤酸碱度空间分布数据服务 土壤氮磷钾空间分布数据服务 土壤深度空间分布数据服务 土壤侵蚀强度空间分布数据服务 土壤含水量空间分布数据服务 土壤重金属含量空间分布数据服务 中国土壤阳离子交换量空间分布数据 中国土壤容重含量空间分布数据
社会经济类数据服务 点击更多
全国夜间灯光指数数据服务 全国GDP公里格网数据服务 全国人口密度数据服务 全国poi感兴趣点空间分布数据 全国医院空间分布数据服务 全国学校空间分布数据服务 全国居民点空间分布数据 全国旅游景区空间分布数据 全国机场空间分布数据 全国地铁线路站点空间分布数据 人口调查空间分布数据服务 社会经济统计年鉴数据 中国各省市统计年鉴 中国县级统计年鉴数据 农田分类面积统计数据服务 农作物长势遥感监测数据服务 医疗资源统计数据服务 教育资源统计数据服务 行政区划空间分布数据服务
卫星遥感影像数据服务 点击更多
Landsat陆地资源卫星影像 高分二号遥感影像数据 高分一号遥感影像数据 Sentinel2哨兵2卫星影像 SPOT系列卫星遥感影像数据 WorldView卫星遥感影像数据 资源三号卫星遥感影像数据 GeoEye卫星遥感影像数据 NOAA/AVHRR卫星遥感影像 MODIS卫星遥感影像 环境小卫星 Rapideye快鸟卫星影像
生态环境数据服务 点击更多
高精度归一化植被指数NDVI空间分布数据 高精度净初级生产力NPP空间分布数据 LAI叶面积指数空间分布数据 全国地表温度LST空间分布数据 全国生态系统服务空间数据集 全国湿地沼泽分类空间分布数据集 全国陆地生态系统类型空间分布数据集 全国农田生产潜力数据集 全国GPP初级生产力数据 全国农田熟制空间分布数据集 中国植被区划数据 中国草地资源数据 全国月度NDVI归一化植被指数空间分布数据 月度净初级生产力NPP空间分布数据 全国年度NDVI归一化植被指数空间分布数据 年度净初级生产力NPP空间分布数据 增强型植被指数EVI空间分布数据 RVI比值植被指数空间分布数据
-
- 数据检索
- 业务产品
- 免费专区
- 图书百科
- 行业新闻
- 关于我们
哨兵系列卫星

简介
哨兵系列卫星是哥白尼计划的一部分,该计划是欧盟的一个地球观测计划。要了解哨兵卫星,我们需要先了解哥白尼计划。
#哥白尼计划
几十年来,欧洲各国在地球观测领域做了大量研发工作,但具有重复性与缺乏服务连续性。1998 年,欧洲成立了全球环境安全监测GMES用于统筹各国的地球观测系统。2012 年 ,在欧盟直接参与融资和发展后,该系统后来更名为哥白尼。
哥白尼计划由三部分组成:
空间部分(哨兵系列太空任务与其他太空机构任务);
测量部分(提供海洋、大陆表面和大气信息的陆基和机载数据收集网络);
数据管理与全球共享部分;
#哨兵卫星年表
| 卫星名 | 发射时间(年月日) | 终止时间 | 卫星定位 |
|---|---|---|---|
| Sentinel-1A | 2014.4.3 | 在运行,预期寿命7年 | 雷达 |
| Sentinel-1B | 2016.4.25 | 在运行,预期寿命7年 | 雷达 |
| Sentinel-2A | 2015.6.23 | 在运行,预期寿命7年 | 高分辨率光学 |
| Sentinel-2B | 2017.3.7 | 在运行,预期寿命7年 | 高分辨率光学 |
| Sentinel-3A | 2016.2.16 | 在运行,预期寿命7年 | 包含雷达、光学成像光谱仪、定位等7类传感器 |
| Sentinel-3B | 2018.4.25 | 在运行,预期寿命7年 | 包含雷达、光学成像光谱仪、定位等7类传感器 |
| Sentinel-4 | 预计2023年发射 | 预期寿命8.5年 | 气象 |
| Sentinel-5P | 2017.10.13 | 在运行,预期寿命7年 | 大气污染观测 |
| Sentinel-5 | 预计2021-2022年发射 | 预期寿命7.5年 | 大气监测 |
| Sentinel-6A | 2020.11.21 | 在运行,预期寿命5.5年 | 全球海洋地形观测 |
| Sentinel-6B | 预计2025年12月发射 | 预期寿命5.5年 | 全球海洋地形观测 |
| Sentinel-7 | 暂无时间安排 | 暂无 | 人为二氧化碳排放监测 |
| Sentinel-8 | 暂无时间安排 | 暂无 | 高时空地表温度监测 |
| Sentinel-9 | 暂无时间安排 | 暂无 | 极地冰雪地形高度计 |
| Sentinel-10 | 暂无时间安排 | 暂无 | 环境高光谱成像 |
| Sentinel-11 | 暂无时间安排 | 暂无 | 极地成像微波辐射计 |
| Sentinel-12 | 暂无时间安排 | 暂无 | 欧洲雷达观测系统-L波段SAR |
#哨兵一号
#简介
Sentinel-1 任务包括由两颗极轨卫星Sentinel-1A与Sentinel-1B组成星座,昼夜运行,执行 C 波段合成孔径雷达成像。可供用户使用的 Level-0、Level-1 和 Level-2 数据产品。

#传感器
SENTINEL-1 携带一台 C-SAR传感器,工作在 5.405 GHz 的中心频率。它包括一个右视有源相控阵天线,支持快速的仰角和方位角扫描。C-SAR传感器在双极化(HH + HV,VV + VH)通过一个发射链(可切换到H或V)和两个平行的支撑件来实现操作接收对H和V偏振链。双极化数据可用于土地覆盖分类和海冰应用。
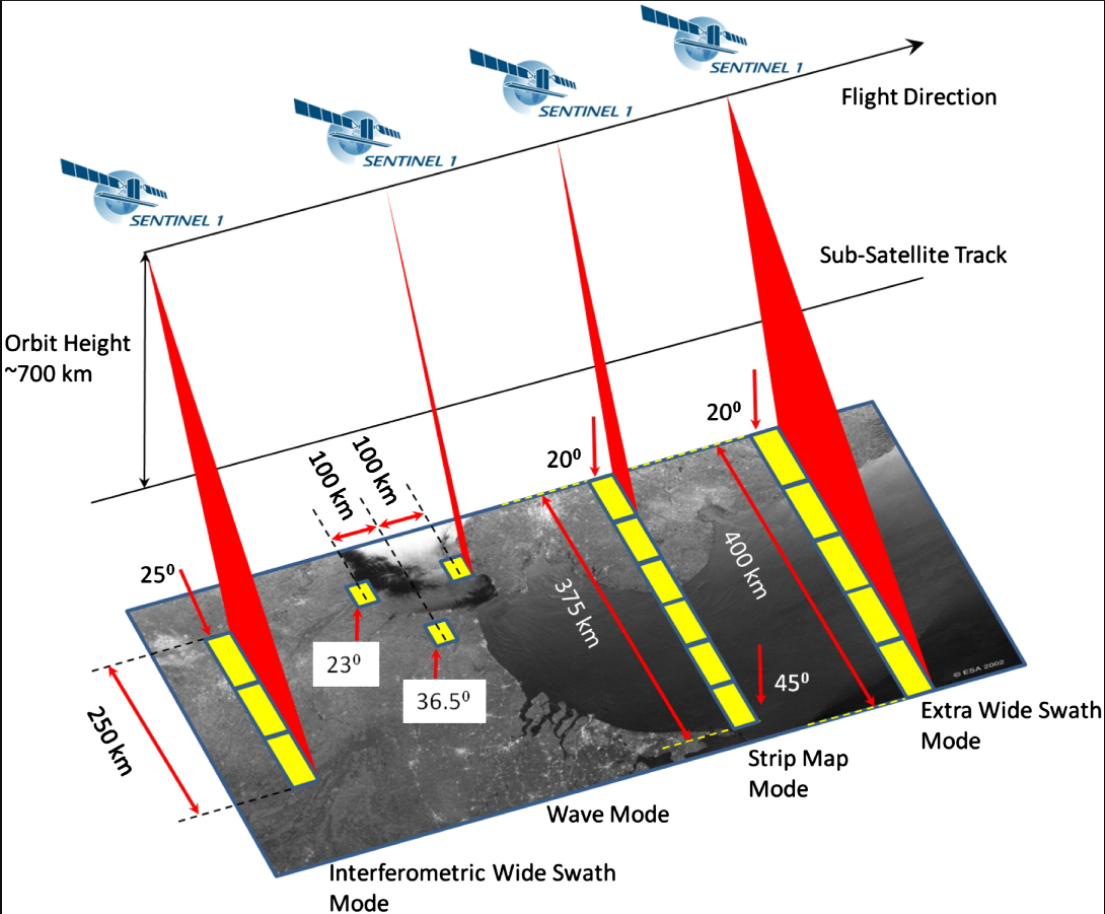
Sentinel-1拥有四种采集模式:
- 带状图 (Stripmap,SM)
- 干涉宽幅 (Interferometric Wide swath,IW)
- 超宽幅 (Extra-Wide swath,EW)
- 波浪模式 (Wave mode,WV)。
#带状图(SM)模式:
该模式窄幅宽度为80 公里,提供 5 m x 5 m 分辨率影像。Sentinel-1通过改变光束入射角和仰角光束宽度,用户可以选择六个成像条带之一。
#干涉宽幅(IW)模式:
该模式是Sentinel-1在陆地上的默认采集模式,窄幅宽度为250 公里,提供 5 m x 20 m 分辨率影像。
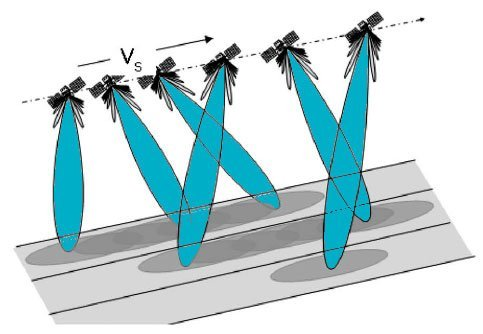
Sentinel-1在该模式下,使用 TOPSAR 技术。除了像 SCANSAR 在范围内控制波束外,还可以在每个脉冲串的方位方向上从后到前电子控制波束,避免扇形并产生更高质量的图像。多普勒频谱(在方位域中)和波数频谱(在仰角域中)的充分重叠确保了干涉测量。
#超宽幅(EW)模式:
该模式主要用于海上和极地区域运营服务,满足覆盖面广,短重访时间要求。
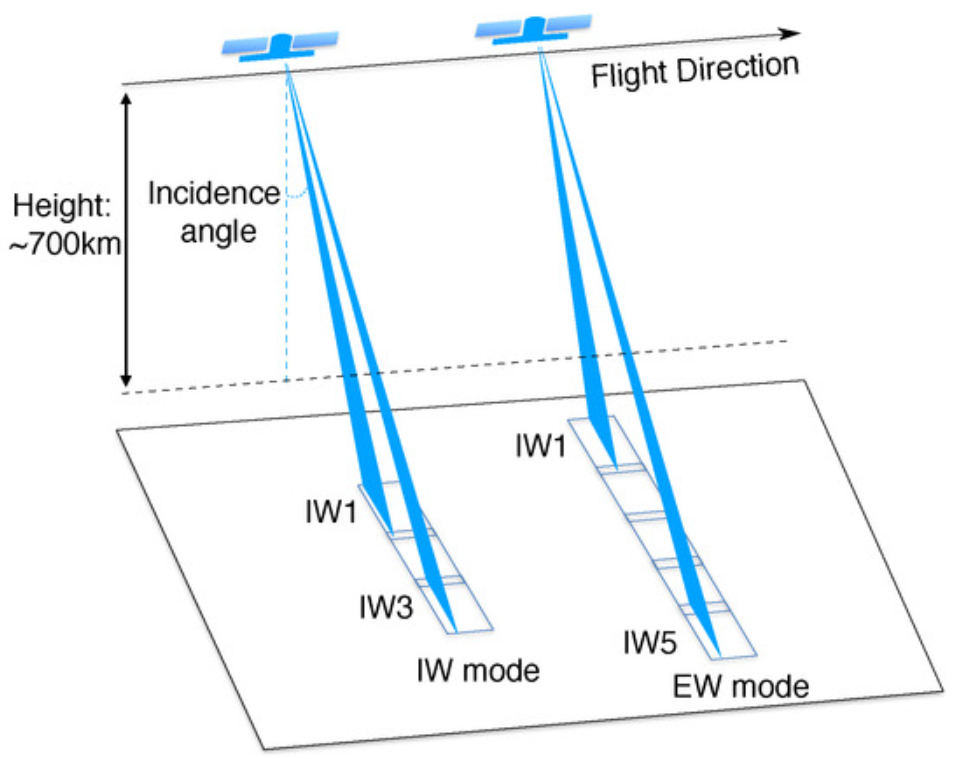
EW 模式的工作方式类似于 IW 模式,采用 TOPSAR 技术,使用五个子带而不是三个,导致分辨率较低(20 m x 40 m)。EW 模式和 IW 模式类似,同样可用于干涉测量。
#波浪(WV)模式
SENTINEL-1的WV模式与全球海浪模型相结合,用以确定海洋上波浪的方向、波长和高度。
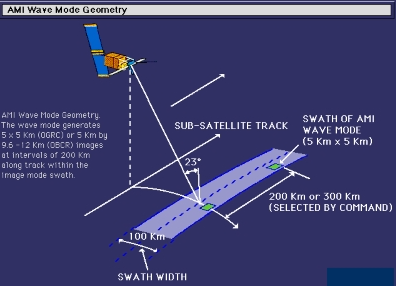
波模式由 20 公里 x 20 公里的条带图像组成,传感器两个不同的入射角上交替采集。每 100 公里采集一次波图像,同一入射角的影像相隔 200 公里。
#产品介绍
目前欧空局官网上提供4种产品数据下载,分别是原始数据RAW、SLC、GRD和OCN。

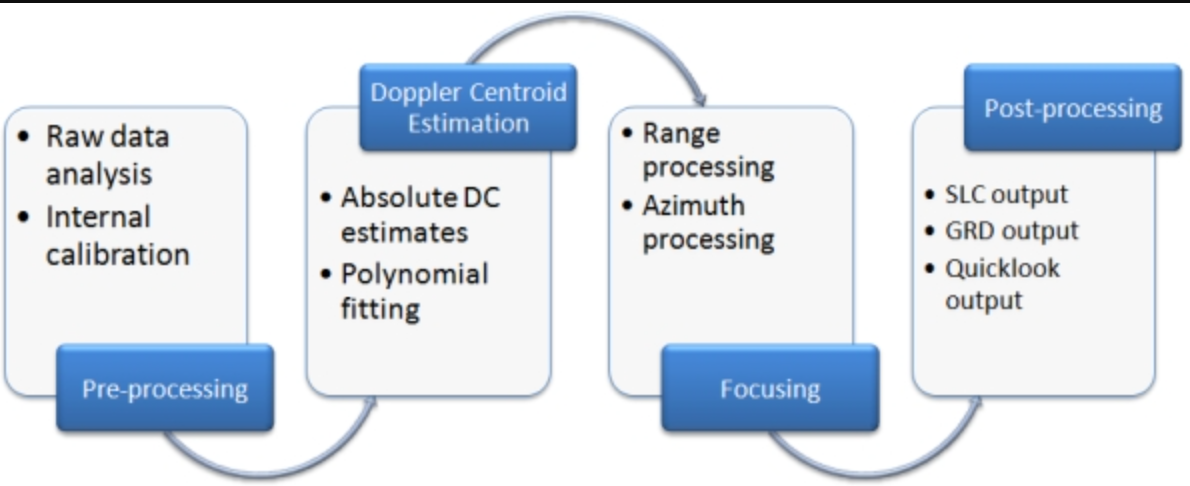
生成一级数据产品所涉及的处理步骤包括预处理、多普勒质心估计、单视复聚焦、生成 SLC 产品、生成GRD 产品、影像后处理和用于组装多个子的模式特定处理。具体的生成过程如下所示:
1 级数据可以处理成单视复数 (SLC) 和/或地面范围检测 (GRD) 产品。
SLC 产品保留了相位信息并以自然像素间距进行处理。
GRD 产品包含检测到的幅度并进行多视以减少散斑的影响。
OCN是针对Wave Mode推出的2级产品。
#数据下载
仅限目前我知道的,一共有四种方法可以下载:
- 欧空局官网 (https://scihub.copernicus.eu/)
- 地理空间数据云 (http://www.gscloud.cn/)
- Google Earth Engine (https://code.earthengine.google.com/)
- PIE Engine (https://engine.piesat.cn/engine/home)

我这里比较推荐大家使用地理空间数据云进行下载,主要是两个原因:数据更新及时;国内下载速度快。
地理空间数据云操作比较简单,不再做介绍。这里介绍官网的下载教程:
进入欧空局官网(https://scihub.copernicus.eu/):
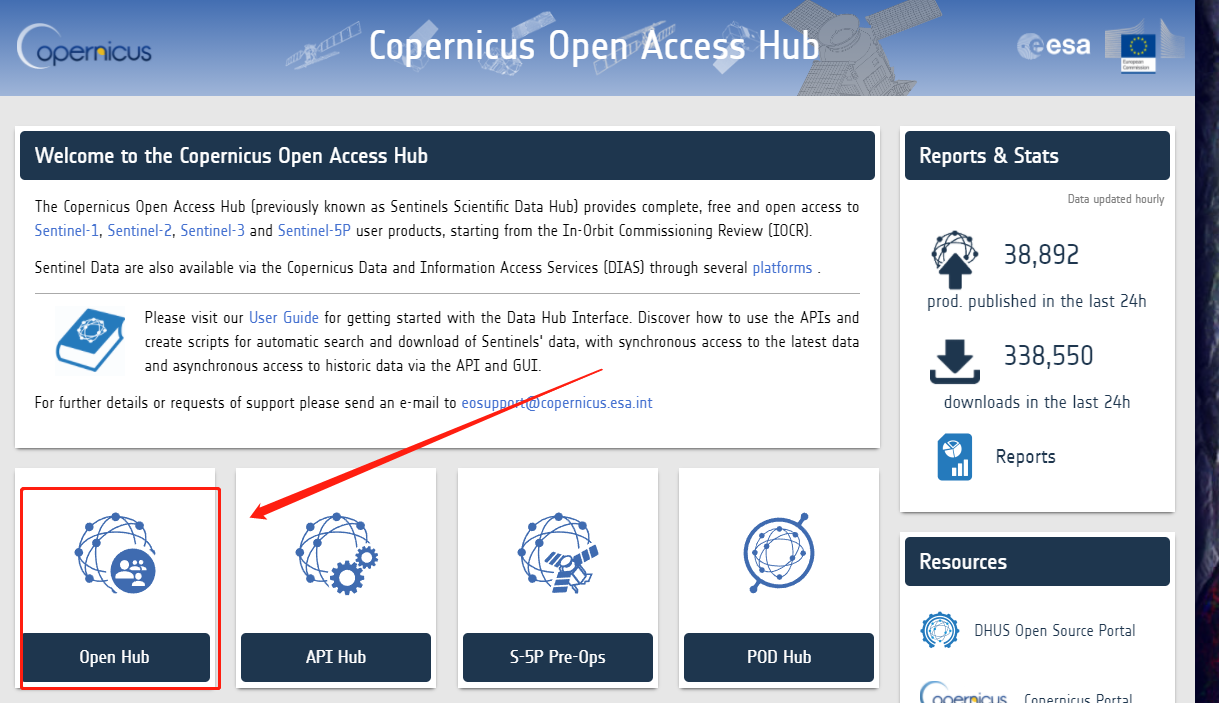
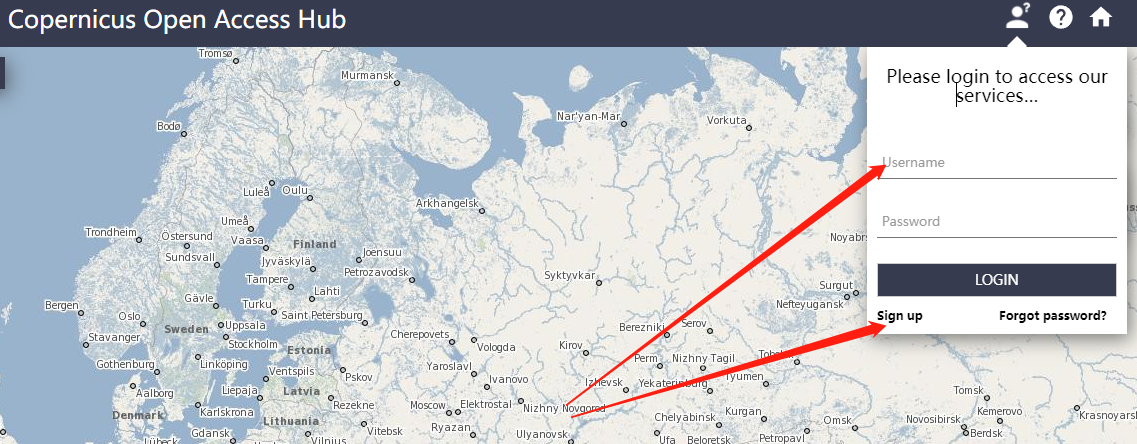
点击进入Open Hub,如果有账号直接登录,没有账号点击Sign up:
按要求填写个人资料,完成后点击Register:
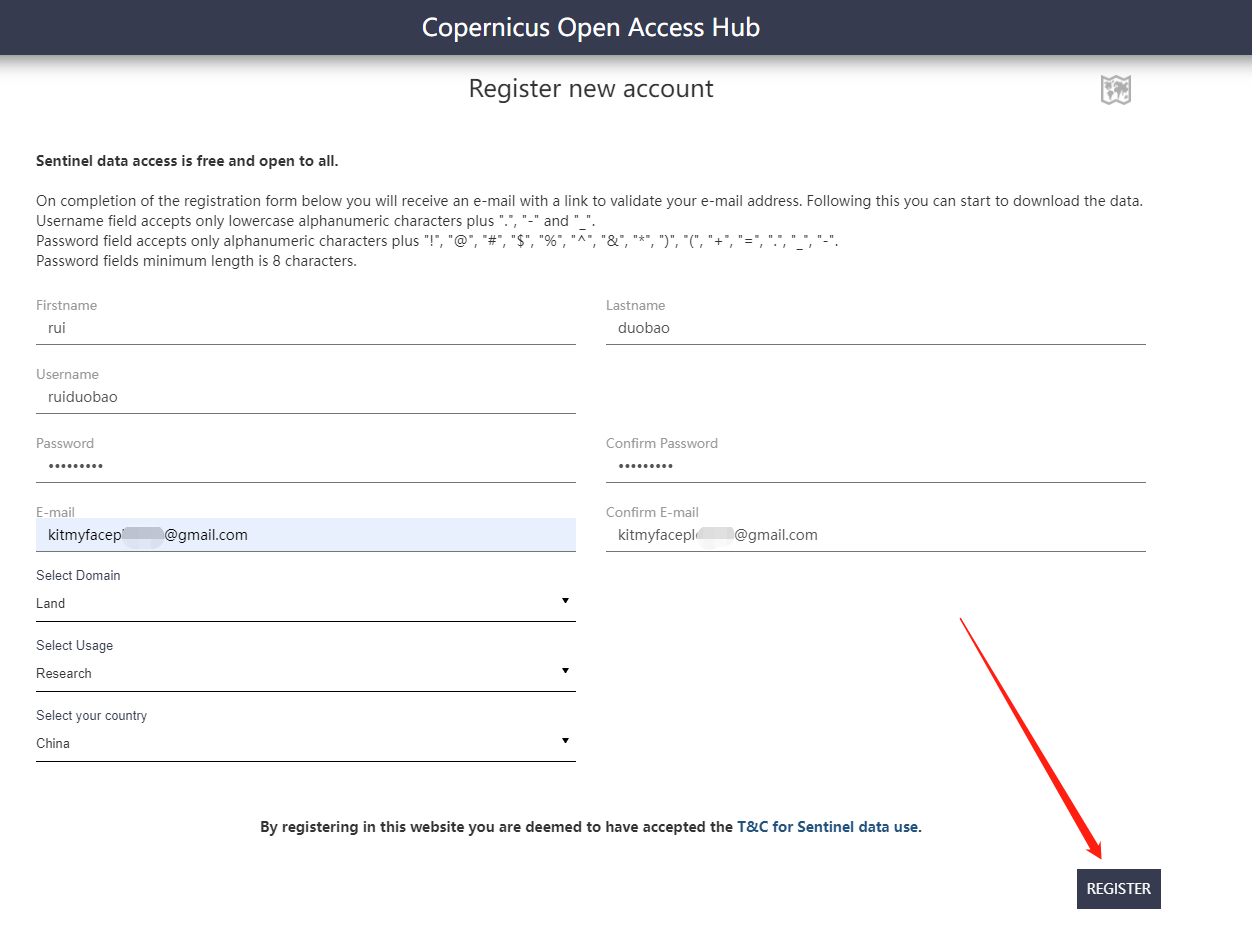
之后会弹出一个窗口,需要去自己的邮箱激活账号,进入自己的邮箱中跳转激活链接即可:
账号激活后,登录主页面,鼠标左键勾选待下载区域影像:

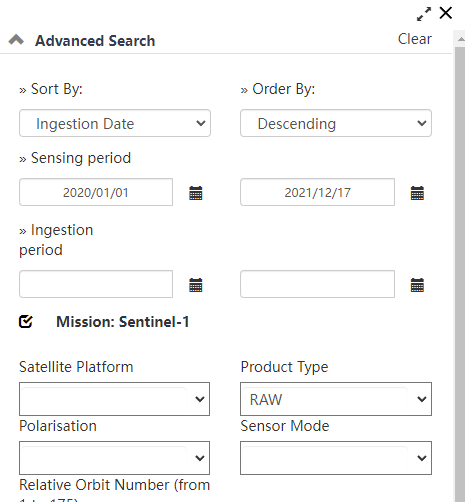
点击数据栏,进行数据筛选:

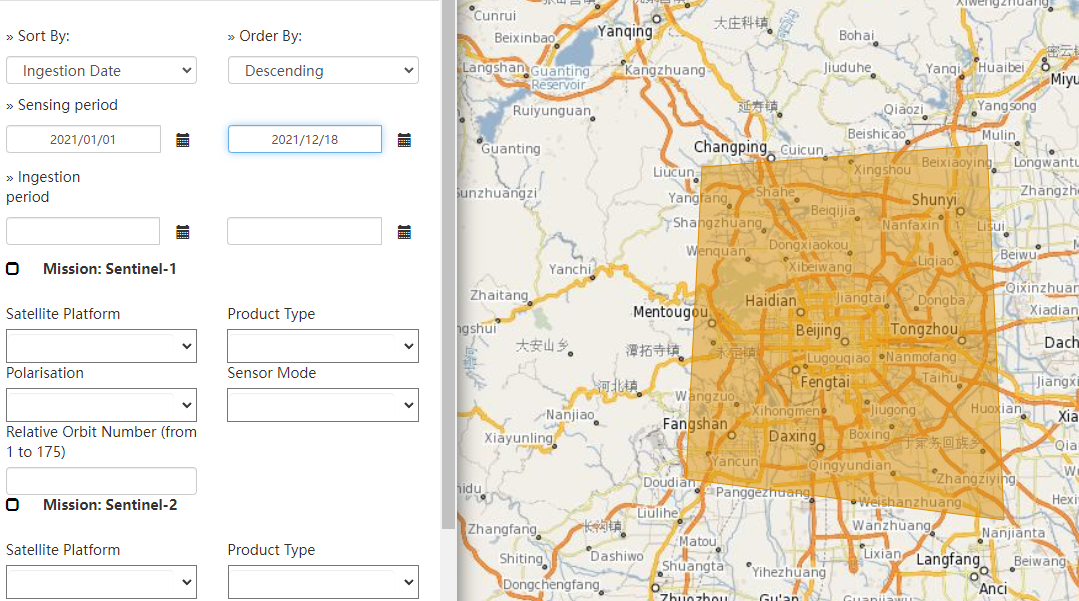
在数据筛选栏,选择时间(两个时间sensing period和ingestion period,个人理解是采样时间和入库时间,未查到相关资料,一般来说选sensing period就行了)、极化方式、卫星、产品类型等:
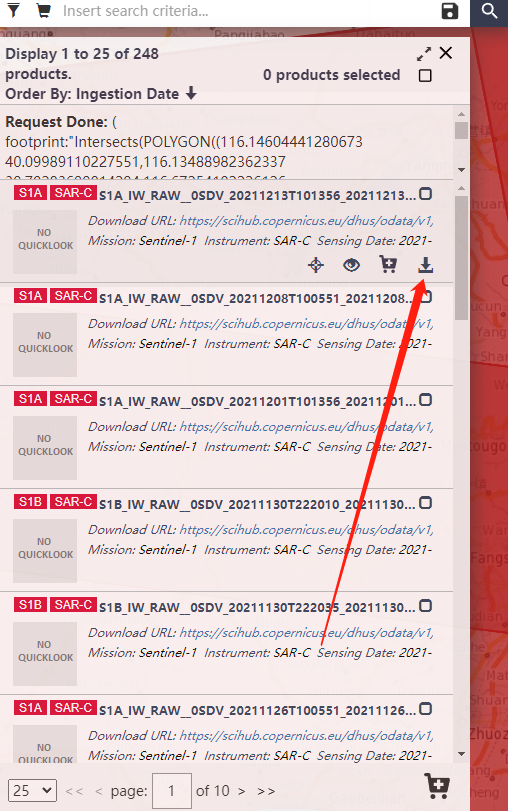
点击搜素按钮,会弹出相应影像,点击下载即可:
#哨兵二号
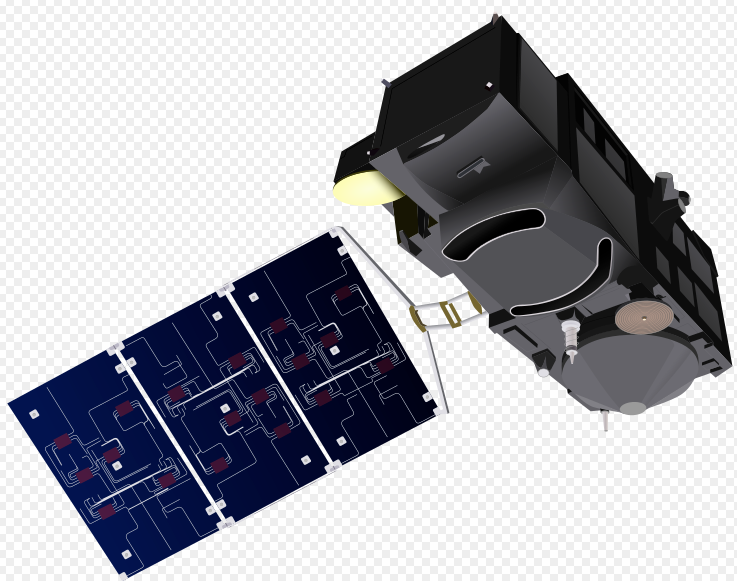
Sentinel-2 任务由两颗极轨卫星Sentinel-2A(2015年6月23日发射)和Sentinel-2B( 2017年3月7日发射)组成,分布在同一太阳同步轨道上,彼此成 180° 相位,幅宽为290 公里。

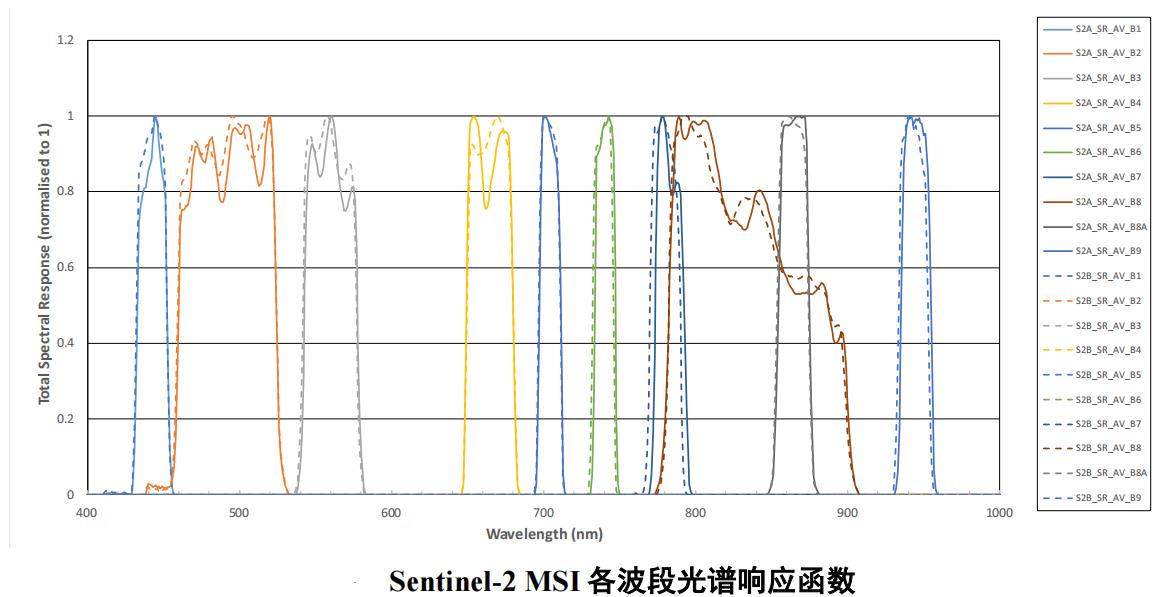
#波段介绍
每颗 Sentinel-2 卫星都携带一个多光谱仪器 (MSI),在可见光、近红外和短波红外光谱范围中共有 13 个波段。
| 波段 | 中央波长 (µm) | 空间分辨率 (m) |
|---|---|---|
| 波段 1 -沿海气溶胶 | 0.443 | 60 |
| 波段2 – 蓝 | 0.490 | 10 |
| 波段3 – 绿 | 0.560 | 10 |
| 波段4 – 红 | 0.665 | 10 |
| 波段5 – 植被红边 | 0.705 | 20 |
| 波段6 -植被红边 | 0.740 | 20 |
| 波段7 -植被红边 | 0.783 | 20 |
| 波段8 – 近红外 | 0.842 | 10 |
| 波段8A -植被红边 | 0.865 | 20 |
| 波段9 – 水蒸气 | 0.945 | 60 |
| 波段10 – 短波红外线-卷云 | 1.375 | 60 |
| 波段11 -短波红外线 | 1.610 | 20 |
| 波段12 -短波红外线 | 2.190 | 20 |
#波段组合
我们通过使用波段组合来更好地解释图像中的要素特征,其目的是以创造性的方式重新安排可用的波段。
通过使用波段组合,我们可以从图像中提取特定的信息。例如,某些波段组合可以突出图像中的地质、农业或植被特征。如果您想亲自查看 Sentinel 波段组合,那么可以查看 Sentinel Playground,它能够显示更多的波段组合情况。
#自然色 (B4, B3, B2)
自然色波段组合以红色 (B4)、绿色 (B3) 和蓝色 (B2) 三种方式来呈现,其目的是以我们眼睛看待世界的方式来显示图像,正如我们所看到的,健康的植被是绿色的,城市通常以白色和灰色来表示,而水是深蓝色的,不过这取决于它的清洁程度。
自然色带组合使用红色(B4)、绿色(B3)和蓝色(B2)波段。其目的是以我们的眼睛看世界的方式显示图像。正如我们所看到的,健康的植被是绿色的,城市通常以白色和灰色来表示。水是深蓝色的,不过这取决于它的清洁程度。
#彩色红外线 (B8, B4, B3)
彩色红外波段组合旨在强调健康和不健康的植被情况。通常使用近红外 (B8) 波段,尤其是它特别擅长反射叶绿素的特点。这就是为什么在彩色红外图像中,较密集的植被是红色的,而城市地区是白色的。
#短波红外线 (B12, B8A, B4)
短波红外波段组合使用 SWIR (B12)、NIR (B8A) 和红色 (B4)三种波段。该合成图显示了各种绿色深浅的植被情况。一般来说,较深的绿色表示植被较密集,棕色表示的是裸露的土壤和建筑区域。
#农业 (B11, B8, B2)
农业波段组合使用 SWIR-1 (B11)、近红外 (B8) 和蓝色 (B2)三种波段。它主要用于监测作物的健康状况,它使用短波和近红外线,这两个波段都特别擅长突出显示深绿色的茂密植被区域。
#地质波段 (B12, B11, B2)
地质波段组合是寻找地质特征的巧妙应用,包括断层、岩性和地质构造。地质学家往往会通过 SWIR-2 (B12)、SWIR-1 (B11) 和蓝色 (B2) 波段的特征来处理,不过他们往往更倾向于使用 Sentinel 波段组合进行分析。
#水深测量 (B4, B3, B1)
顾名思义,水深测量波段组合有利于海岸的研究。水深测量波段组合使用的是红色 (B4)、绿色 (B3) 和海岸带 (B1),同样,沿海大气气溶胶波段的使用有利于估算水中的悬浮沉积物状况。
#植被指数 (B8-B4)/(B8+B4)
近红外表示植被强烈反射,红光表示植被吸收情况。植被指数有利于量化植被的数量。归一化植被指数的公式为(B8-B4)/(B8+B4)。高值表示茂密的树冠,低值或负值表示城市和水景。
由于近红外(植被强烈反射)和红光(植被吸收)的特点,植被指数有利于量化植被数量。归一化差值植被指数的公式为 (B8-B4)/(B8+B4),其中高值表示树冠致密的情况,低值或负值表示城市和水景区域。
#水分指数 (B8A-B11)/(B8A+B11)
水分指数是寻找植物水分压力的理想选择方式。它使用短波和近红外来生成水分含量指数,一般来说,较潮湿的植被具有较高的值,而较低的水分指数值表明植物因水分不足而受到的压力值。
#产品介绍
目前Sentinel-2主要提供两种产品数据:L1C和L2A。
L1C:该产品经正射校正和亚像元级几何精校正,为天顶表观反射率数据,每张影像为100 公里 x 100 公里,大小约为 500 MB。
L2A:该产品是利用欧空局官方提供的 Sen2cor工具,对 L1C 进行大气校正得到地表反射率数据产品。从2016年10月起提供全欧洲的数据,从2017年1月起提供全球的数据。
#数据下载
#数据下载方式
根据笔者查到的资料,目前能下载Sentinel-2影像的网站有5个,分别为:
| 网站 | 网址 | 备注 |
|---|---|---|
| 欧空局官网 | https://scihub.copernicus.eu | 官网 |
| 地理空间数据云 | http://www.gscloud.cn | 延后一周更新 |
| Google Earth Engine | https://earthengine.google.com | 最靠谱的云计算平台,数据及时并全面 |
| PIE Engine | https://engine.piesat.cn/engine/home | 缺失2017年前的数据 |
| Microsoft Planetary Computer | https://planetarycomputer.microsoft.com | 只有L2A级别数据 |
#官网下载方式
我们采用官网的方式进行数据下载:
参考哨兵1号卫星数据下载方式,注册账号后进入主页面,并勾选研究区,选择时间:
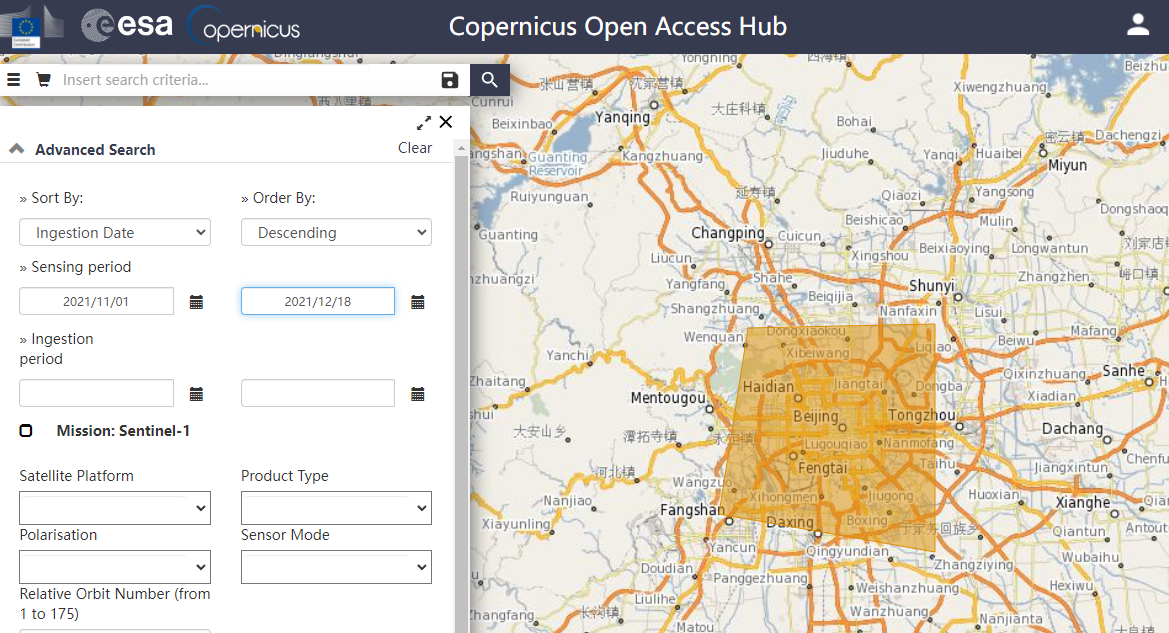
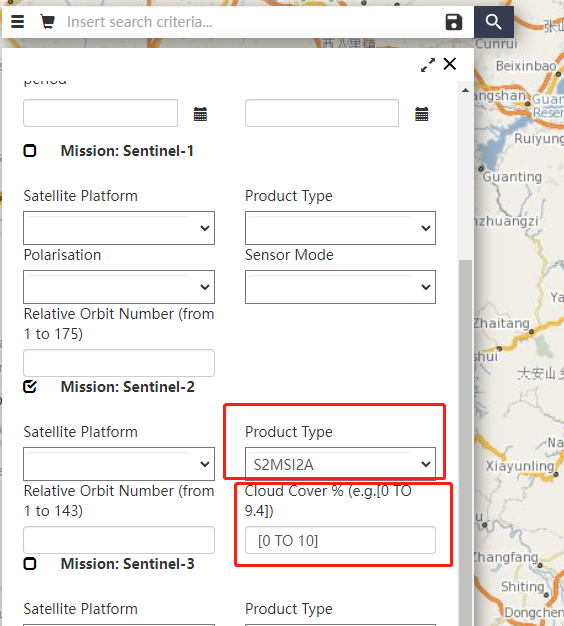
哨兵二号共有4个参数选择,分别是选择卫星、产品类别、相对轨道、云覆盖率,一般来说只选择产品级别和云覆率。需要注意,云覆盖率的选择方式为中括号加条件,比如[0 TO 10]代表只选择云覆盖率在0-10%的影像:
筛选完成后即可点击下载:
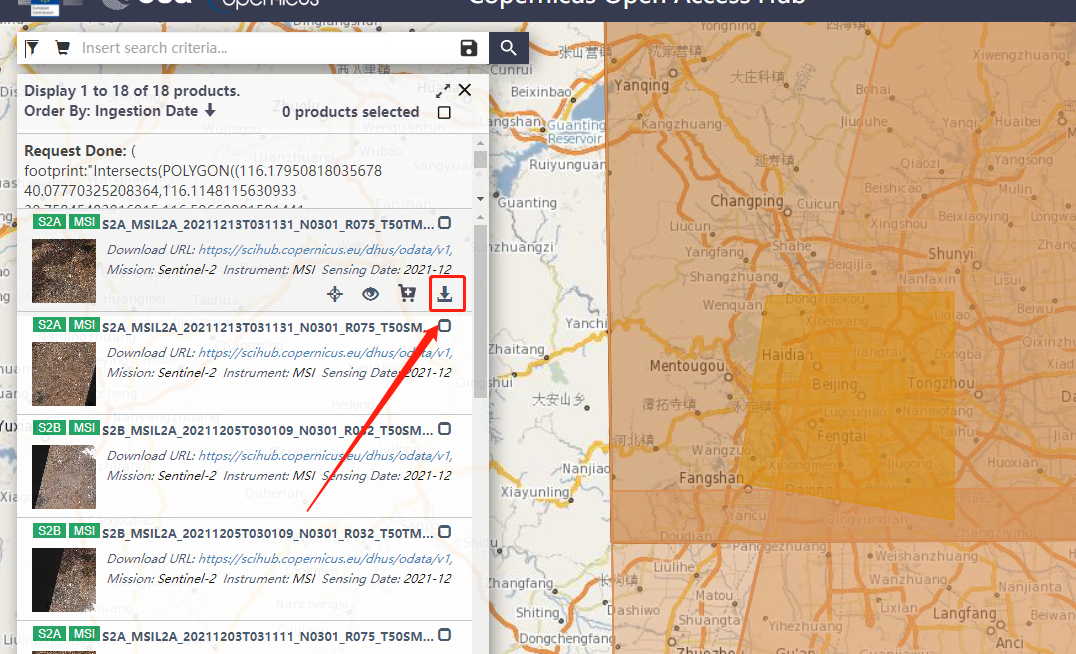
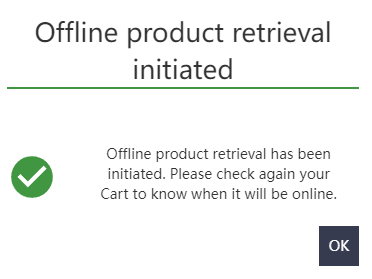
如果你是下载数年前的影像,有可能该影像已被下架,你需要提交申请,大概一天后即可下载。比如我要下载2019年北京地区的Sentinel-2 L2A数据,
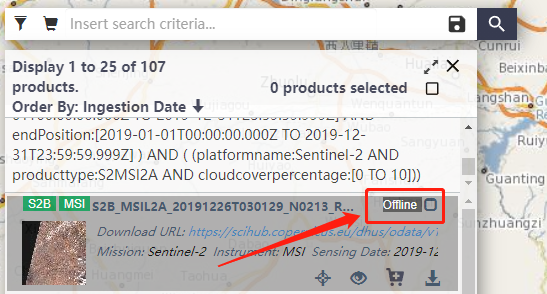
这时显示的是数据已下架,你需要加入购物车,再点击下载会弹出该数据会进行重新上架,最迟一周,最短1天该数据即可下载。
#GEE下载数据
官网的数据下载方式还得在本地做波段合成、裁剪和镶嵌,甚至还会遇到数据已下架的情况。因此笔者一般不喜欢官网下载。
如果你只是想下载某地区的哨兵数据,不做研究,可以考虑直接GEE下载,方便快捷。我这里列一个简单的数据下载脚本,仅供参考:
//研究区可视化
Map.addLayer(roi)
Map.centerObject(roi,9)
//时间
var startDate = ee.Date('2021-5-27');
var endDate = ee.Date('2021-8-31');
var collection = SENTINEL
.filterDate(startDate, endDate)//时间过滤
.filterBounds(roi)//位置过滤
.filter(ee.Filter.lt('CLOUDY_PIXEL_PERCENTAGE',10))//云量过滤,
.sort('CLOUDY_PIXEL_PERCENTAGE')//云量排序
.first() ;//选择云量最小的影像
//裁剪研究区
var image=collection.clip(roi);
//选择导出的波段
image=image.select([ "B2", "B3", "B4", "B8"]);
//加载假彩色影像
Map.addLayer(image, imageVisParam, "image-假彩色");
//加载真彩色影像
Map.addLayer(image, imageVisParam2, "image-真彩色");
//导出
Export.image.toDrive({
image: image,
description: 'ROI',
scale: 10,
region: roi,
maxPixels:1e13
});
完整代码的可运行链接:
https://code.earthengine.google.com/2af1e4b4d6ce7eeb6a2e029c29266748
#哨兵三号
截至 2021 年12月,Sentinel-3由2颗卫星组成:Sentinel-3A和Sentinel-3B。欧空局计划将分别在 2024 年和 2028 年发射Sentinel-3C 和 Sentinel-3D卫星,以确保 Sentinel-3 任务的连续性。Sentinel-3 也是目前搭载传感器最多的一颗卫星,共计7类传感器。
#传感器
这里分别对Sentinel-3的七种传感器进行介绍:
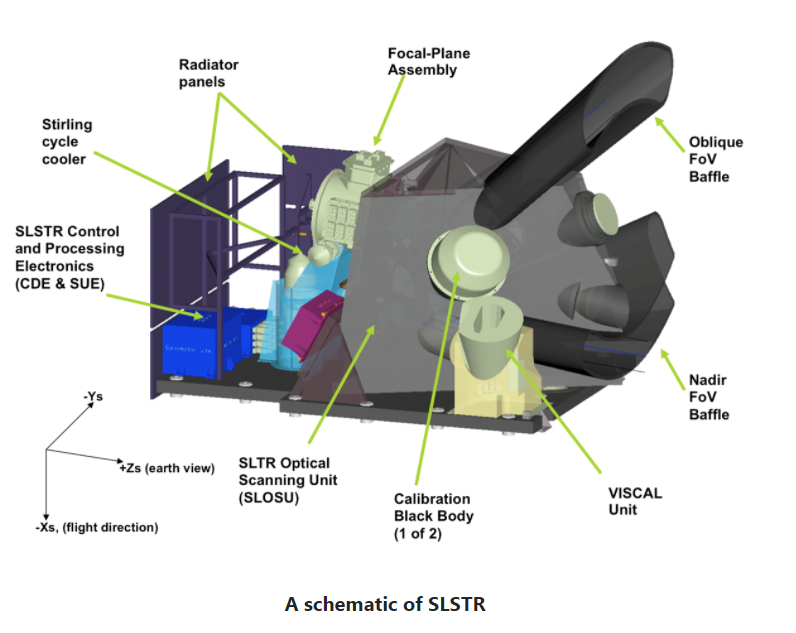
- 海陆表面温度辐射计(SLSTR):用来确定全球海面温度。它在九个光谱通道和两个额外的波段进行测量,以优化火灾监测。前六个光谱带涵盖可见光、近红外光谱以及短波红外;VNIR 适用于频段 1 至 3,SWIR 适用于频段 4 至 6。这 6 个频段的空间分辨率为 500 m,频段 7 至 9 以及另外两个频段的空间分辨率为1 公里。
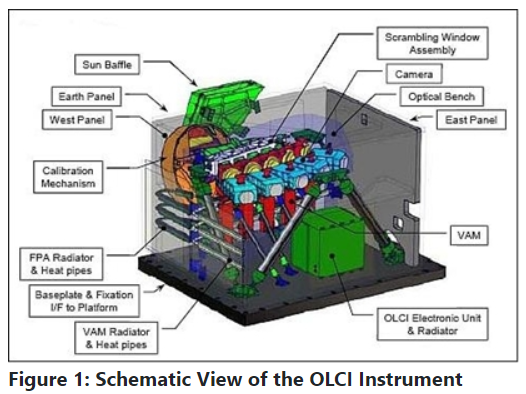
- 海洋和陆地色彩仪器(OLCI):一种中等分辨率的成像光谱仪,它使用五个摄像头来提供广阔的视野。OLCI 有 21 个光谱带,波长范围从光学到近红外。波段的宽度从 400 nm到 1020 nm不等,可用于测量水蒸气吸收、气溶胶水平和叶绿素吸收。SLSTR 和 OLCI 是具有重叠路径的光学仪器,允许新的组合应用。由于气候变化因素,内陆沿海地区已成为越来越受关注的地区,从 2002 年到 2012 年,中分辨率成像光谱仪 (MERIS) 提供了用于分析的高质量观测。OLCI 对 MERIS 进行了改进,因为它增加了六个光谱带、更高的信噪比 (SNR)、减少了太阳眩光、最大 300 m 的空间分辨率以及增加的地面覆盖范围,这是目前太空中唯一能够检测蓝藻的传感器。
-
合成孔径雷达高度计(SRAL):地形仪器,可在海冰、冰盖、河流和湖泊上提供准确的地形测量。它使用双频Ku和C 波段,并由大气校正的微波辐射计(MWR) 和轨道定位的 DORIS 接收器支持。
-
卫星综合多普勒轨道图和无线电定位(DORIS) :一种用于轨道定位的接收器。
-
微波辐射计(MWR):测量水蒸气、云中的水含量以及地球发出的热辐射。MWR 传感器的辐射精度为 3.0 K。
-
激光回射器(LRR):用于使用激光测距系统准确定位在轨卫星。当与 SRAL、DORIS、MWR 结合使用时,它们将获得海洋和内陆水域的详细地形测量结果。
-
全球导航卫星系统(GNSS):提供精确的轨道确定并可以同时跟踪多颗卫星。
#产品类型介绍
SLSTR:
Level-1经过质量控制、正射定位(纬度和经度坐标、高度)、地标和初步像素分类(例如土地/水/云掩码)。
Level-2 是从Level-1 产品中提供的测量数据得出地球物理量,专门用于海洋和陆地应用领域。
**OLCI **:
Level-1包括大气顶 (TOA) 辐射测量、辐射校正、校准和光谱表征。
Level-2 是从Level-1 产品中提供的测量数据得出地球物理量。
**Synergy **:
SYN Level-1处理 OLCI 和 SLSTR 辐射度和亮度温度,其关联的注释进行相同计算。同时也计算 OLCI 参考通道与所有其他 OLCI 和 SLSTR 通道之间的对应网格。 SYN Level-2处理来自 OLCI 和 SLSTR 仪器的信息,为地表分析提供改进的数据。
Altimetry :
Level-1 是 Level-0 数据进行仪器校正后的数据。 Level-2 是Level-1 数据进行地球物理校正后的数据 。
#数据下载方式
根据笔者查到的资料,目前能下载全部Sentinel-3影像的网站只有欧空局官网(https://scihub.copernicus.eu),GEE只能下载OLCI EFR影像,因此采用官网的下载方式:
参考哨兵1号卫星数据下载方式,注册账号后进入主页面,并勾选研究区,选择时间:
选择相应的哨兵三号的产品数据(由于产品类型选项与传感器、级别数据互不相干,只建议在产品类型或者相应传感器里面勾选条件):

选择适合的数据,进行数据下载:

#哨兵四号
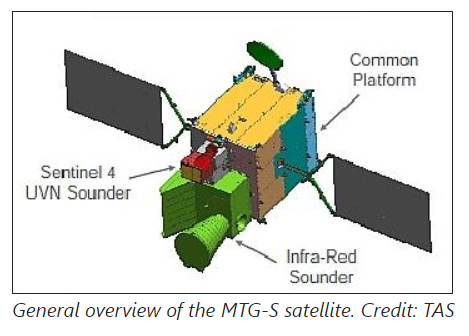
哨兵四号暂未发射,该卫星的主要目标是监测欧洲上空的空气质量和气溶胶, 以高空间分辨率和快速重访时间支持哥白尼大气监测服务 (CAMS)。该卫星将由欧盟、欧洲航天局 (ESA) 与欧洲环境署 (EEA) 共同运营。
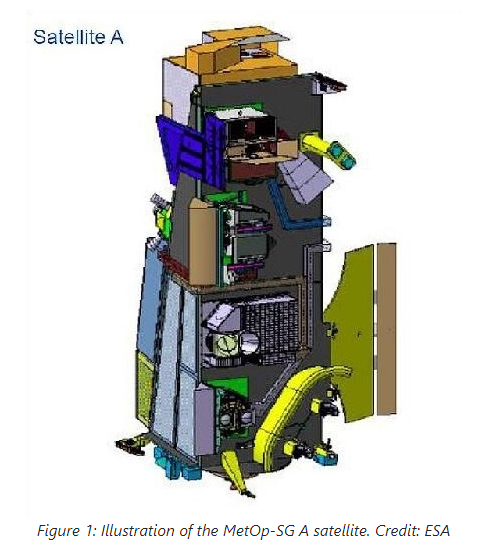
#哨兵五号
该卫星暂未发射,预计2021-2022年发射。Sentinel-5 将专注于空气质量和成分-气候相互作用,主要数据产品为 O3、NO 2、SO2、HCHO 和气溶胶。此外,Sentinel-5 还将提供 CO、CH4 和平流层 O3 的质量参数,每天覆盖全球气候、空气质量、臭氧、地表紫外线影像。
#哨兵5p
哨兵5p于2017 年 10 月 13 日从俄罗斯普列谢茨克航天发射场成功发射,拥有一颗携带对流层监测仪器 (TROPOMI) 传感器,主要目标是执行具有高时空分辨率的大气测量,用于空气质量、臭氧和紫外线辐射以及气候监测和预测。
#传感器
Tropomi(TROPO spheric Monitoring Instrument,对流层监测仪)可感应紫外(UV)、可见光(VIS)、近(NIR)和短波红外(SWIR),以监测在大气中的臭氧、甲烷、甲醛、气溶胶、一氧化碳、NO2 和SO2 。
Tropomi 每秒进行一次测量,覆盖约 2600 公里宽和 7 公里长的区域,分辨率为 7 x 7 公里。该传感器使用光栅光谱仪分离成不同的波长,然后再用四个不同的检测器对各自的光谱带进行测量。UV光谱仪的光谱范围为270-320 nm,可见光光谱仪的范围为310-500 nm,NIR的范围为675-775 nm,SWIR的范围为2305-2385 nm。
#数据下载
使用GEE和PIE进行数据下载。
#数据介绍与处理
Sentinel-5P是欧空局于2017年10月13日发射的一颗全球大气污染监测卫星。卫星搭载了对流层观测仪(Tropospheric Monitoring Instrument,TROPOMI),可以有效的观测全球各地大气中痕量气体组分,包括NO2、O3、SO2、 HCHO、CH4和CO等重要的与人类活动密切相关的指标,加强了对气溶胶和云的观测。
本文由三大主要部分组成:
-
TROPOMI数据介绍
-
数据下载
-
数据处理与可视化
-
- Panoply可视化
- S5Processor包nc转TIFF
#TROPOMI数据介绍
TROPOMI是目前世界上技术最先进、空间分辨率最高的大气监测光谱仪。成像幅宽达2600km,每日覆盖全球各地,成像分辨率达7km×3.5km。ESA提供了L1B和L2两种级别的数据下载。L1B数据介绍如表1所示,L2如表2所示。
#L1B产品介绍
表1.L1B数据产品介绍和对应的用户文档
| File type | Spectrometer | Spectral range [nm] | Comment | User Documentation |
|---|---|---|---|---|
| L1B_RA_BD1 | UV | 270 - 300 | Radiance product band 1 | |
| L1B_RA_BD2 | 300 - 320 | Radiance product band 2 | ||
| L1B_RA_BD3 | UVIS(紫外-可见光过渡区域) | 320 - 405 | Radiance product band 3 | ATBD |
| L1B_RA_BD4 | 405 - 500 | Radiance product band 4 | ||
| L1B_RA_BD5 | NIR | 675 - 725 | Radiance product band 5 | |
| L1B_RA_BD6 | 725 - 775 | Radiance product band 6 | PRF | |
| L1B_RA_BD7 | SWIR | 2305-2345 | Radiance product band 7 | |
| L1B_RA_BD8 | 2345-2385 | Radiance product band 8 | ||
| IR_UVN | UVN | 270-775 | Irradiance product UVN module | Other |
| IR_SIR | SWIR | 2305-2385 | Irradiance product SWIR module | documents |
- IODS (Input Output Data Specification):description of the products that are the result from the Level 0 to Level 1bprocessing介绍了L0到L1B数据的处理过程;
- ATBD (Algorithm Theoretical Basis Document): high leveldescription of the algorithms used in the Level-0 to 1b data processing介绍了L0到L1B数据处理算法原理
- PRF (Product Readme File): description of changesbetween different product versions and overall quality information (available afew months after launch)介绍了不同版本数据间的差别和总体的质量信息。
#L2产品介绍
表2.L2数据产品介绍和数据文档
| Product type | Parameter | User Documents |
|---|---|---|
| L2__O3____ | Ozone (O3) total column总柱含量 | PRF-O3-NRTI, PRF-03-OFFL, PUM-O3, ATBD-O3, IODD-UPAS |
| L2__O3_TCL | Ozone (O3) tropospheric column对流层柱含量 | PRF-03-T, PUM-O3_T, ATBD-O3_T, IODD-UPAS |
| L2__O3__PR | Ozone (O3) profile总剖面数据 | PUM-PR , ATBD-O3_PR , IODD-NL |
| L2__O3_TPR | Ozone (O3) tropospheric profile对流层剖面数据 | PUM-PR , ATBD-O3_PR , IODD-NL |
| L2__NO2___ | Nitrogen Dioxide (NO2), total and tropospheric columns总柱和对流层柱含量 | PRF-NO2, PUM-NO2, ATBD-NO2, IODD-NL |
| L2__SO2___ | Sulfur Dioxide (SO2) total column总柱含量 | PRF-SO2, PUM-SO2, ATBD-SO2, IODD-UPAS |
| L2__CO____ | Carbon Monoxide (CO) total column总柱含量 | PRF-CO, PUM-CO, ATBD-CO, IODD-NL |
| L2__CH4___ | Methane (CH4) total column总柱含量 | PRF-CH4, PUM-CH4, ATBD-CH4, IODD-NL |
| L2__HCHO__ | Formaldehyde (HCHO) total column总柱含量 | PRF-HCHO, PUM-HCHO , ATBD-HCHO , IODD-UPAS |
| L2__CLOUD_ | Cloud fraction, albedo, top pressure云量、反照率、云顶大气压 | PRF-CL, PUM-CL, ATBD-CL, IODD-UPAS |
| L2__AER_AI | UV Aerosol Index紫外区域气溶胶指数 | PRF-AI, PUM-AI, ATBD-AI, IODD-NL |
| L2__AER_LH | Aerosol Layer Height (mid-level pressure)气溶胶层高度(中等气压) | PRF-LH, PUM-LH , ATBD-LH , IODD-NL |
| UV product1 | Surface Irradiance/erythemal dose | - |
| L2__NP_BDx, x=3, 6, 7 2 | Suomi-NPP VIIRS Clouds云产品辅助数据 | PRF-NPP, PUM-NPP, ATBD-NPP |
- PUM (Product User Information): information on the technicalcharacteristics of the S5P/TROPOMI Level 2 products 介绍了L2数据产品的技术特征
- ATBD (Algorithm Theoretical Basis Document): detailedinformation on the retrieval algorithms理论算法说明文档
- IODD (Input Output Data definition): description of the inputand output data of the S5P/TROPOMI Level 2 processing介绍了L2数据产品输入和输出数据情况及处理过程
- PRF (Product Readme File): description of changesbetween different product versions and overall quality information (availablefew months after launch) 介绍了不同版本数据间的差别和总体的质量信息。
#L2数据三种数据流
L2数据产品又分为了三种数据流:
- 近实时数据流(near-real-time, NRTI),卫星成像3小时后即可获取,数据可能不完整或存在质量缺陷;
- 离线数据流(Offline, OFFL),一般成像后几天即可获得;
- 再次处理数据流(Reprocessing, RPRO),有些数据可能经过了多次处理,获得的最新的质量最佳的版本。
一般情况下,长期的时序变化研究不可以混用不同级别的数据流,推荐使用最新的RPRO数据以保证数据质量。
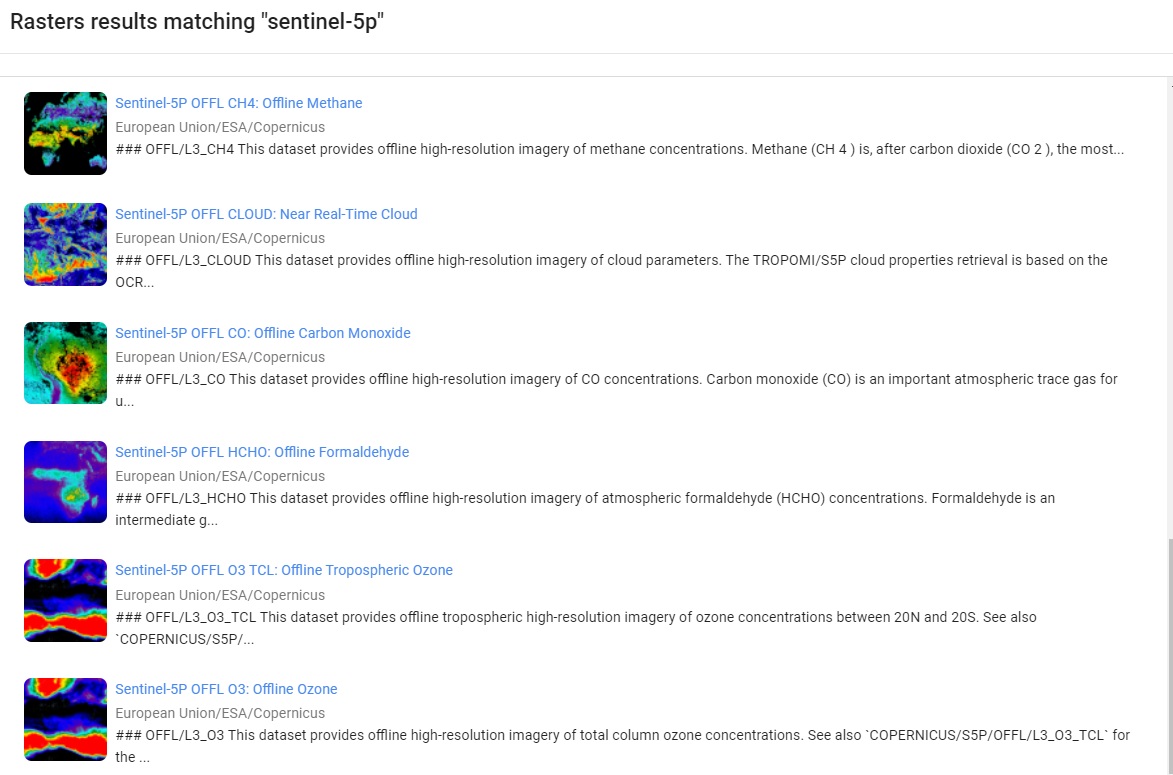
#数据下载
Sentinel-5P数据公开下载,直接从以下网址检索影像并下载,无需注册和翻墙,直接使用ESA提供的访客帐号即可。帐号密码均为:s5pguest
数据下载网址:https://s5phub.copernicus.eu/dhus/#/home
打开S5P下载地址并登陆访客帐号,如下图所示进行操作:
- 切换矩形选框定位
- 绘制研究区范围,确定影像下载位置
- 选择搜索方式,这里是Sensing Date,也就是成像日期,根据成像日期筛选影像
- 开始时间,从这个时间点开始的影像会加入选择
- 结束时间,选择这个时间点之前的影像
- 选择影像产品类型,具体影像产品类型说明请参见前面的表1,表2
- 处理级别,可选,指定了6,7也就确定了
- 数据流,如果是实时动态监测,选择NRTI实时动态数据流,一般研究选OFFL,处理好的质量可靠的影像,RPRO数量较少
- 开始查询,搜索影像
接下来就可以查看搜索结果,如下图所示:
- 数据下载链接,可以直接复制链接在IDM里面下载(哨兵数据下载推荐使用IDM下载器)
- 查看影像详细信息,在这里可以查看影像的具体覆盖范围、成像时间等详细情况
- 影像下载按钮,点击这个可以直接下载
点击上图按钮2后,详细信息情况
#数据处理与可视化
在这里提供两种处理和可视化S5P数据的方法:NASA Panoply软件包和R语言S5Processor程序包。
#NASA Panoply
Panoply是NASA开发的一款基于JAVA的netCDF/HDF/GRIB数据查看器。下载地址:https://www.giss.nasa.gov/tools/panoply/
运行需要JAVA环境,安装好JAVA环境后,解压程序包,双击Panoply.exe即可运行
加载影像后,选择里面的数据产品进行可视化:
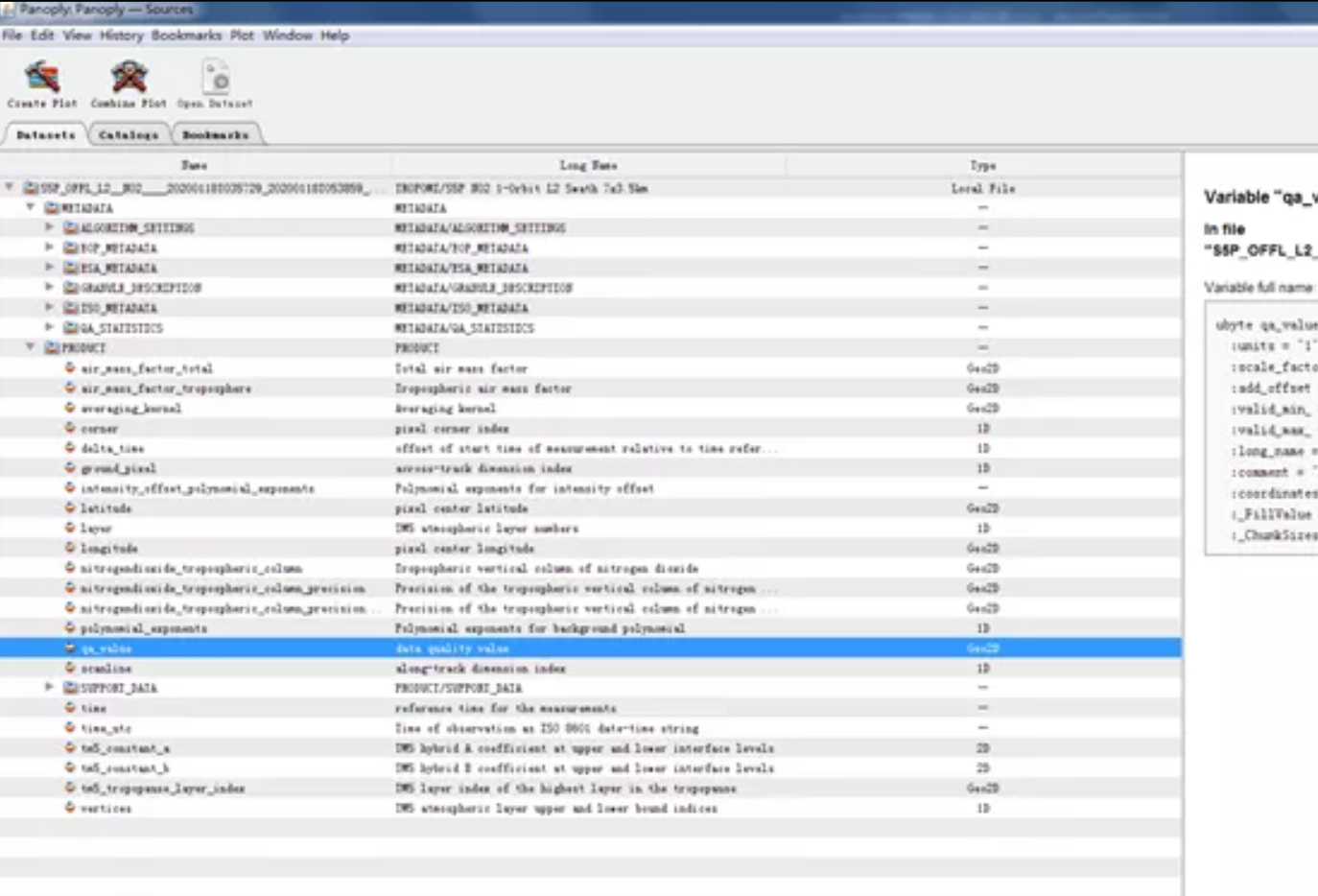
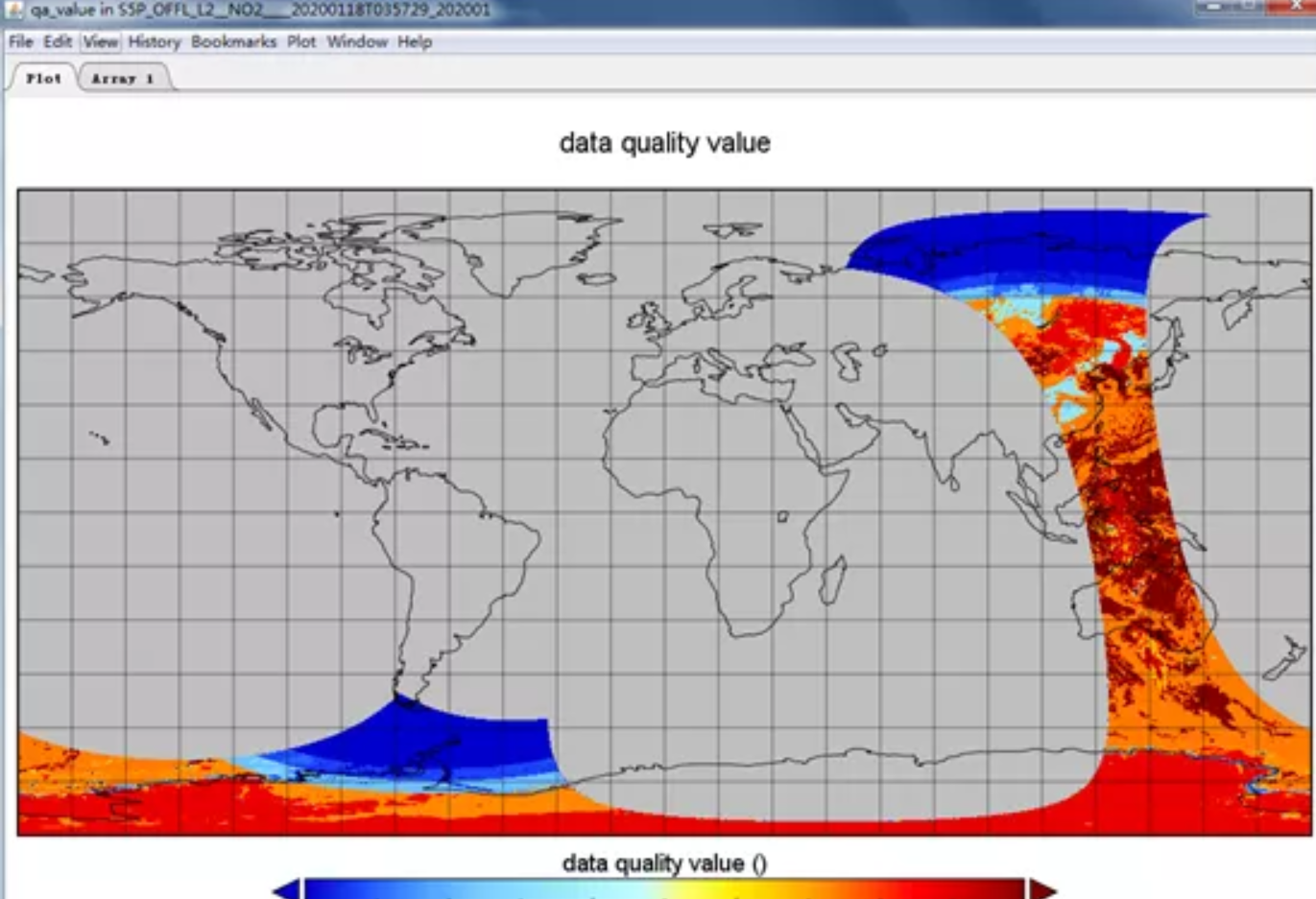 对qa_value进行可视化
对qa_value进行可视化
Panoply用于查看S5P数据非常方便,但是不能用来转换格式,无法将S5P数据输出到GIS软件中。
#S5PROCESSOR
为了把S5P的NC数据转为TIFF数据,我试了好多种方法,终于在GITHUB上面发现了一个R包:S5Processor
R包地址:https://github.com/MBalthasar/S5Processor
#S5PROCESSOR安装
很多同学反映不知道怎么安装S5processor这个包。
首先,这个包需要借助Rtools,下载一个Rtools,根据自己运行环境选择一个合适的版本,安上就好。
https://cran.r-project.org/bin/windows/Rtools/
 提示没有devtools,好说,直接安装一下这个包就好
提示没有devtools,好说,直接安装一下这个包就好
 安装devtools
安装devtools
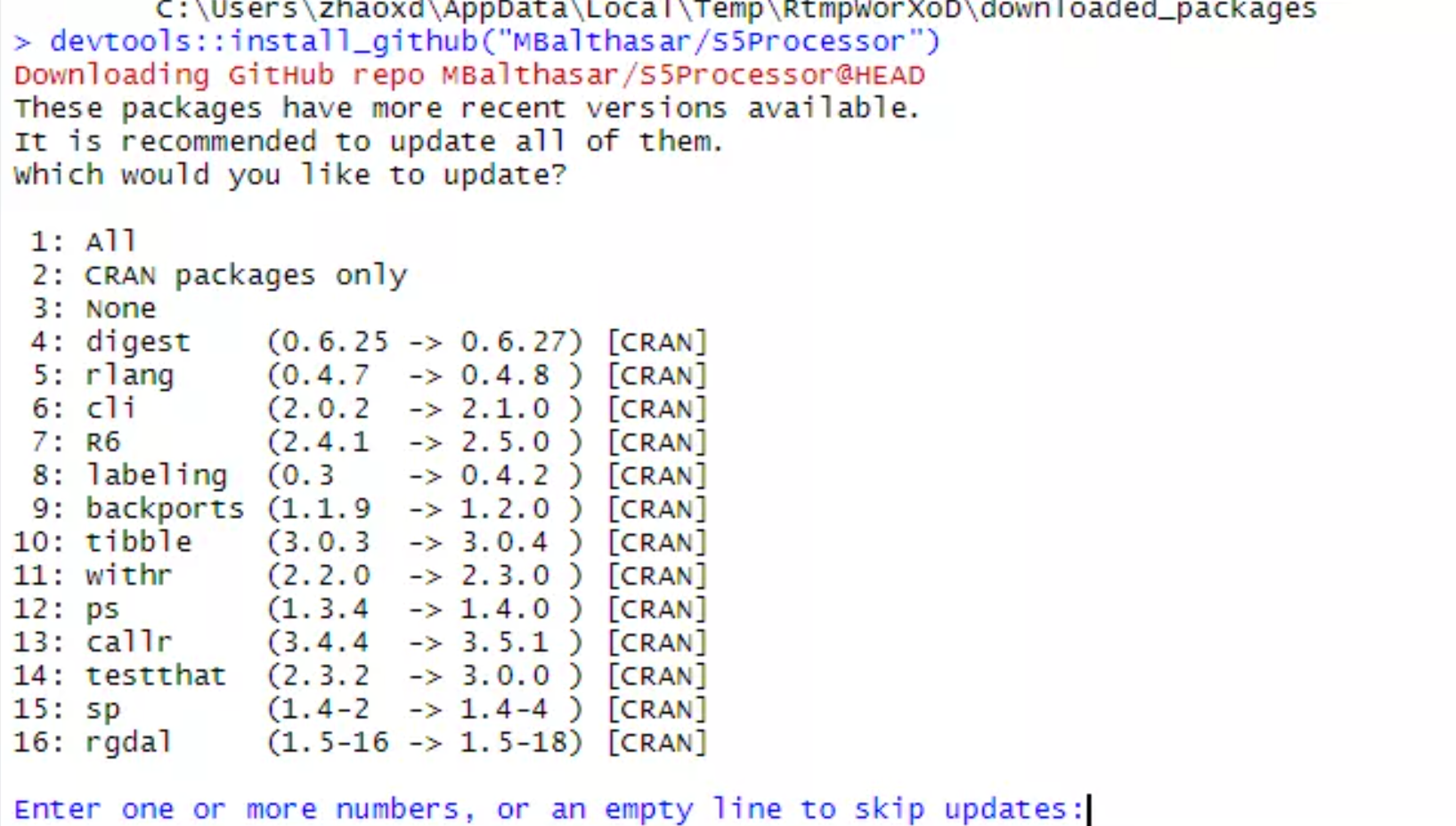 是否更新R包?可以更新,也可以跳过
是否更新R包?可以更新,也可以跳过
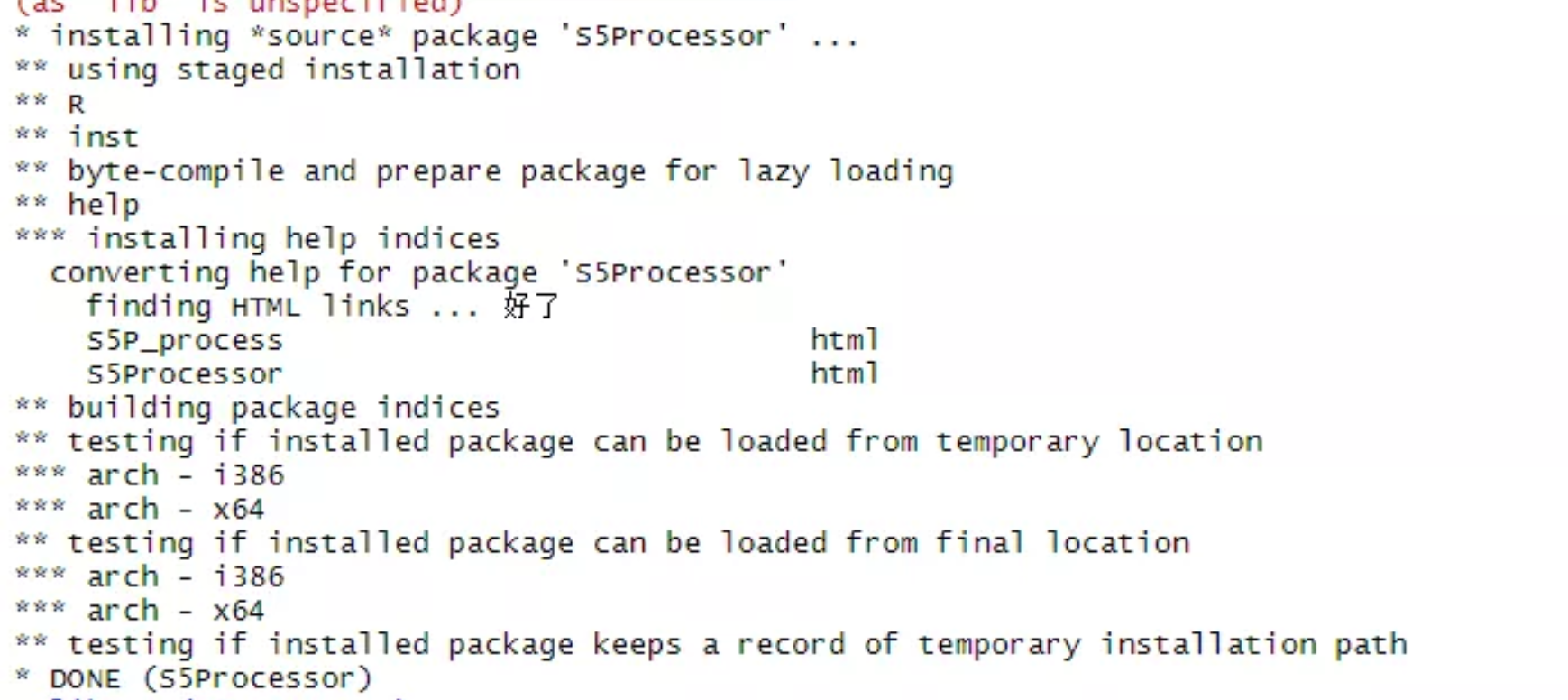 安装完成
安装完成
#S5PROCESSOR数据转换
我主要是想对S5P数据进行格式转换,转换为TIFF格式后便于在GIS中进行分析。代码实例如下:
devtools::install_github("MBalthasar/S5Processor")
library(S5Processor)
library(ncdf4)
library(ggplot2)
library(dismo)
library(maptools)
library(raster)
library(geosphere)
library(rgdal)
library(rgeos)
library(sp)
BeijingNO2 <- S5P_process(input = "S5P_OFFL_L2__NO2____20200118T035729_20200118T053859_11730_01_010302_20200121T230957.nc",
product = 39)
writeRaster(BeijingNO2, "BeijingNO2", format = 'GTiff', overwrite = TRUE)
关于NO2数据产品和单位的介绍见产品文档(参考物文献7)
转换后的数据就可以在ArcGIS中打开了,坐标系识别正常,NO2垂直柱密度单位。
#哨兵六号
Sentinel-6的首颗卫星于2020年11月21日发射,主要用于全球海洋监测。此外该卫星还配备收集大气数据的传感器,用于改进天气预报和飓风追踪。

#传感器
Sentinel-6 卫星携带三种传感器,分别是:
Poseidon-4:Ku/C 波段天底指向合成孔径雷达(SAR,仅限 Ku 波段)高度计;
AMR-C:用于气候的多频高级微波辐射计;
HRMR:用于增强沿海地区大气参数测量的实验性高分辨率微波辐射计
#数据下载
虽然该卫星已经发射,但笔者未查询到相关数据的下载方式。
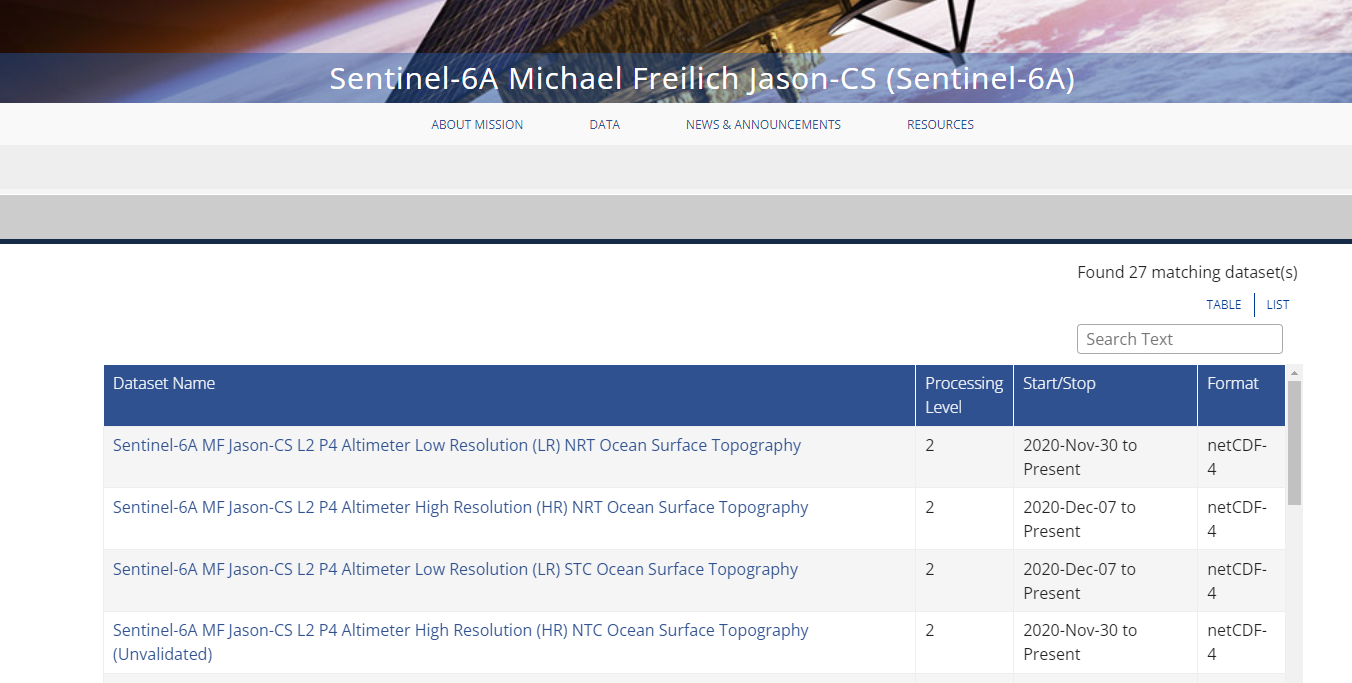
可以试试NASA公布的27景Sentinel-6 的样例数据,下载地址为:https://podaac.jpl.nasa.gov/Sentinel-6?sections=data。
#哨兵七号-哨兵十二号
目前欧空局没有透露更多细节,后续卫星有进展,会继续更新:
#哨兵工具
针对哨兵系列数据的处理和使用,欧空局联合一系列机构开发了众多工具箱,具体为:
#SNAP
SNAP是适用于所有 Sentinel 工具箱的通用架构,是目前使用最广泛的Sentinel工具。
SNAP 非常适合地球观测处理和分析。
下载地址为:http://step.esa.int/main/download/snap-download/
#S1TBX
S1TBX是处理Sentinel-1 数据的工具箱,用于校准、散斑过滤、配准、正射校正、镶嵌、数据转换、偏振测量和干涉测量。
下载地址为:http://step.esa.int/main/download/
#Atmospheric Toolbox
Atmospheric Toolbox是用于摄取、处理和分析大气遥感数据的工具。该工具箱由CODA、HARP、VISAN和QDOAS四部分组成。
下载地址为:https://atmospherictoolbox.org/
#Broadview
ESA和CNES联合开发的高度测量开源工具Broadview。

该工具能够读取来自官方数据中心的所有测高数据(ERS -1 、ERS -12、Topex/Poseidon、Geosat Follow-on、Jason-1、Envisat、Jason-2、CryoSat和 Sentinel-3),并进行高度数据处理和可视化。
#PolSARpro
PolSARpro 用于开发极化 SAR 数据。

下载地址为:https://step.esa.int/main/toolboxes/polsarpro-v6-0-biomass-edition-toolbox/
#CFI
Earth Observation CFI 软件是用于计时、坐标转换、轨道传播、卫星指向计算和目标能见度计算的预编译 C 库集合。
下载地址为:https://eop-cfi.esa.int/index.php/mission-cfi-software/eocfi-software/branch-4-x
#ESOV NG
该工具是作为所有 ESA 卫星仪器条带可视化的工具,并帮助用户了解卫星测量的时间和地点。
https://earth.esa.int/eogateway/tools/esov-software-tools-esov-ng-
还存在很多其他官方和第三方的哨兵数据相关工具,这里不再做详细描述,感兴趣的可以去Google一下。
#参考
https://scihub.copernicus.eu/
https://docs.sentinel-hub.com/
https://www.mdpi.com/2072-4292/11/17/1969/htm
https://en.wikipedia.org/wiki/Copernicus_Programme
https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-1/instrument-payload
开源集思.https://mp.weixin.qq.com/s/XrFctLqditU12zHuaq5x8A




