
- 首 页
- 数据产品
-
土地利用遥感监测数据 点击更多
全球高精度土地利用数据服务 全国作物类型空间分布数据服务 二级分类土地利用数据30m 高精度植被类型分布数据 全国城市功能区划分布数据 全国DEM高程数据服务 全国耕地数据空间分布服务 全国林地分类数据空间分布服务 全国草地类型分类数据空间分布服务 全国水体数据空间分布服务 全国建设用地数据空间分布服务 全国未利用地数据空间分布服务 地形、地貌、土壤理化性质数据服务 全国坡度坡向数据服务 一级分类土地利用数据30m
全国气象气候数据服务 点击更多
全国降水量空间分布数据集 全国气温空间分布数据集 太阳辐射量空间分布数据集 全国气象站点观测数据集 全国平均风速空间分布数据集 全国平均水汽压空间分布数据集 全国蒸散量空间分布数据集 全国日照时数空间分布数据集 全国相对湿度空间分布数据集 全国地表温度空间分布数据集 全国气候区划空间分布数据集 全国气象站点空间分布数据集 全国土壤湿度空间分布数据集 全国水文站点地表径流量空间分布数据集
土壤理化性质数据服务 点击更多
土壤类型空间分布数据服务 土壤质地空间分布数据服务 土壤有机质空间分布数据服务 土壤酸碱度空间分布数据服务 土壤氮磷钾空间分布数据服务 土壤深度空间分布数据服务 土壤侵蚀强度空间分布数据服务 土壤含水量空间分布数据服务 土壤重金属含量空间分布数据服务 中国土壤阳离子交换量空间分布数据 中国土壤容重含量空间分布数据
社会经济类数据服务 点击更多
全国夜间灯光指数数据服务 全国GDP公里格网数据服务 全国人口密度数据服务 全国poi感兴趣点空间分布数据 全国医院空间分布数据服务 全国学校空间分布数据服务 全国居民点空间分布数据 全国旅游景区空间分布数据 全国机场空间分布数据 全国地铁线路站点空间分布数据 人口调查空间分布数据服务 社会经济统计年鉴数据 中国各省市统计年鉴 中国县级统计年鉴数据 农田分类面积统计数据服务 农作物长势遥感监测数据服务 医疗资源统计数据服务 教育资源统计数据服务 行政区划空间分布数据服务
卫星遥感影像数据服务 点击更多
Landsat陆地资源卫星影像 高分二号遥感影像数据 高分一号遥感影像数据 Sentinel2哨兵2卫星影像 SPOT系列卫星遥感影像数据 WorldView卫星遥感影像数据 资源三号卫星遥感影像数据 GeoEye卫星遥感影像数据 NOAA/AVHRR卫星遥感影像 MODIS卫星遥感影像 环境小卫星 Rapideye快鸟卫星影像
生态环境数据服务 点击更多
高精度归一化植被指数NDVI空间分布数据 高精度净初级生产力NPP空间分布数据 LAI叶面积指数空间分布数据 全国地表温度LST空间分布数据 全国生态系统服务空间数据集 全国湿地沼泽分类空间分布数据集 全国陆地生态系统类型空间分布数据集 全国农田生产潜力数据集 全国GPP初级生产力数据 全国农田熟制空间分布数据集 中国植被区划数据 中国草地资源数据 全国月度NDVI归一化植被指数空间分布数据 月度净初级生产力NPP空间分布数据 全国年度NDVI归一化植被指数空间分布数据 年度净初级生产力NPP空间分布数据 增强型植被指数EVI空间分布数据 RVI比值植被指数空间分布数据
-
- 数据检索
- 业务产品
- 免费专区
- 图书百科
- 行业新闻
- 关于我们
GEE学习笔记九十二:Sentinel-2 最新去云方法总结
下面使用例子的原始影像截图如下:

第一种方法:使用QA波段去云
这是我们最常用的方法,具体原理就是利用QA60波段标记实现去云,具体代码如下:
var s2 = ee.ImageCollection("COPERNICUS/S2"),
point = /* color: #98ff00 */ee.Geometry.Point([116.20553071765003, 39.404020061278715]);
/**
*
* remove cloud by QA bands
*
* */
function rmCloudByQA(image) {
var qa = image.select('QA60');
var cloudBitMask = 1 << 10;
var cirrusBitMask = 1 << 11;
var mask = qa.bitwiseAnd(cloudBitMask).eq(0)
.and(qa.bitwiseAnd(cirrusBitMask).eq(0));
return image.updateMask(mask);
}
function main() {
var startDate = "2019-4-4";
var endDate = "2019-4-8";
Map.centerObject(point, 8);
var s2Imgs = s2.filterDate(startDate, endDate)
.filterBounds(point);
Map.addLayer(s2Imgs.first(), {min:0, max:3000, bands:["B4", "B3", "B2"]}, "raw", false);
s2Imgs = s2Imgs.map(rmCloudByQA);
Map.addLayer(s2Imgs.first(), {min:0, max:3000, bands:["B4", "B3", "B2"]}, "cloud");
}
main();
去云的效果如下图:
 编辑
编辑
代码分析:
这段代码中去云的方法是:rmCloudByQA()其他的代码也都是基础代码,我就不在过多解释。
第二种方法:计算云量分数去云
这种方法比较有意思,是一个国外的大牛利用波段组合以及NDSI指数计算得到当前像素是不是云,具体代码如下:var s2 = ee.ImageCollection("COPERNICUS/S2"),
point = /* color: #98ff00 */ee.Geometry.Point([116.20553071765003, 39.404020061278715]);
var _cloudScore = function(img) {
var rescale = function(img, exp, thresholds) {
return img.expression(exp, {img: img})
.subtract(thresholds[0]).divide(thresholds[1] - thresholds[0]);
};
var score = ee.Image.constant(1.0);
score = score.min(rescale(img, 'img.blue', [0.1, 0.3]));
score = score.min(rescale(img, 'img.red + img.green + img.blue', [0.2, 0.8]));
score = score.min(rescale(img, 'img.nir + img.swir1 + img.swir2', [0.3, 0.8]));
var ndsi = img.normalizedDifference(['green', 'swir1']);
return score.min(rescale(ndsi, 'img', [0.8, 0.6]));
};
/**
*
* remove cloud by Score bands
*
* */
function rmCloudByScore(image, thread) {
var preBands = ["B2","B3","B4","B8","B11","B12"];
var newBands = ['blue','green','red','nir','swir1','swir2'];
var score = _cloudScore(image.select(preBands, newBands));
score = score.multiply(100).byte().rename('cloud');
return image.addBands(score)
.updateMask(score.lte(thread));
}
/**
*
* scale image
*
* */
function scaleImage(image) {
var time_start = image.get("system:time_start");
image = image.divide(10000);
image = image.set("system:time_start", time_start);
return image;
}
function main() {
var startDate = "2019-4-4";
var endDate = "2019-4-8";
Map.centerObject(point, 8);
var s2Imgs = s2.filterDate(startDate, endDate)
.filterBounds(point)
.map(scaleImage)
.map(function(image) {
return rmCloudByScore(image, 30);
});
Map.addLayer(s2Imgs.first(), {min:0, max:0.3, bands:["B4", "B3", "B2"]}, "cloud");
}
main();
代码分析:
观察这段代码,有一点需要注意的是:调用去云方法rmCloudByScore(image, threshold)需要传入两个参数,一个是影像另外一个是识别云的阈值(也就是大于多大的值就认为是云,范围是0-100)。还有就是调用这个方法之间首先需要将影像的波段做缩放和将波段名称重新命名为指定的名称,这是因为这个算法内部主要逻辑方法_cloudScore(xxx)它内部计算时候取的都是特殊值,具体参考上述代码。
第三种方法:使用s2cloudless算法去云
这是目前最新的一种去云方法,s2cloudless算法是一种机器学习算法,Sentinel-2影像通过它可以计算得到云掩膜文件。这个算法是由SENTINEL Hub开源的一种算法,地址是:
GitHub - sentinel-hub/sentinel2-cloud-detector: Sentinel Hub Cloud Detector for Sentinel-2 images in Python
在GEE上我们不需要自己去用这个算法来计算云掩膜,GEE官方目前正在利用这个算法来生成一个新的数据集,这个数据集就是Sentinel-2云掩膜数据集(“COPERNICUS/S2_CLOUD_PROBABILITY”)。需要注意的是由于目前这个数据集依然在生产中,所以不一定所有的地方和所有时间段都存在,我们在使用的时候一定要注意。
下面以具体的例子说明如何使用这个数据集:
var s2 = ee.ImageCollection("COPERNICUS/S2"),
s2_cloud = ee.ImageCollection("COPERNICUS/S2_CLOUD_PROBABILITY"),
point = /* color: #98ff00 */ee.Geometry.Point([116.20553071765003, 39.404020061278715]);
/**
*
* remove cloud by probability bands
*
* */
function rmCloudByProbability(image, thread) {
var prob = image.select("probability");
return image.updateMask(prob.lte(thread));
}
/**
*
* scale image
*
* */
function scaleImage(image) {
var time_start = image.get("system:time_start");
image = image.divide(10000);
image = image.set("system:time_start", time_start);
return image;
}
function getMergeImages(primary, secondary) {
var join = ee.Join.inner();
var filter = ee.Filter.equals({
leftField: 'system:index',
rightField: 'system:index'
});
var joinCol = join.apply(primary, secondary, filter);
joinCol = joinCol.map(function(image) {
var img1 = ee.Image(image.get("primary"));
var img2 = ee.Image(image.get("secondary"));
return img1.addBands(img2);
});
return ee.ImageCollection(joinCol);
}
function main() {
var startDate = "2019-4-4";
var endDate = "2019-4-8";
Map.centerObject(point, 8);
var s2Imgs1 = s2.filterDate(startDate, endDate)
.filterBounds(point)
.map(scaleImage);
var s2Imgs2 = s2_cloud.filterDate(startDate, endDate)
.filterBounds(point);
var s2Imgs = getMergeImages(s2Imgs1, s2Imgs2);
s2Imgs = s2Imgs.map(function(image) {
return rmCloudByProbability(image, 50);
});
Map.addLayer(s2Imgs.first(), {min:0, max:0.3, bands:["B4", "B3", "B2"]}, "cloud");
}
main();
运行效果:

代码分析:
从上述代码可以看到,由于这是两个数据集,所以我们首先需要将筛选后的两个数据(s2Imgs1和s2Imgs2)利用join合并为一个数据集,具体方法参考getMergeImages(xxx)。合并后的影像中每一幅都包含一个叫做”probability“的波段,这个波段计算的就是云掩膜的信息(值范围是0-100)。程序中我们利用rmCloudByProbability(image, threshold)方法传入影像和云量阈值,就可以实现去云操作。
其实还有一种方法就是利用GEE封装好的模块算法来实现去云,具体的方法是:
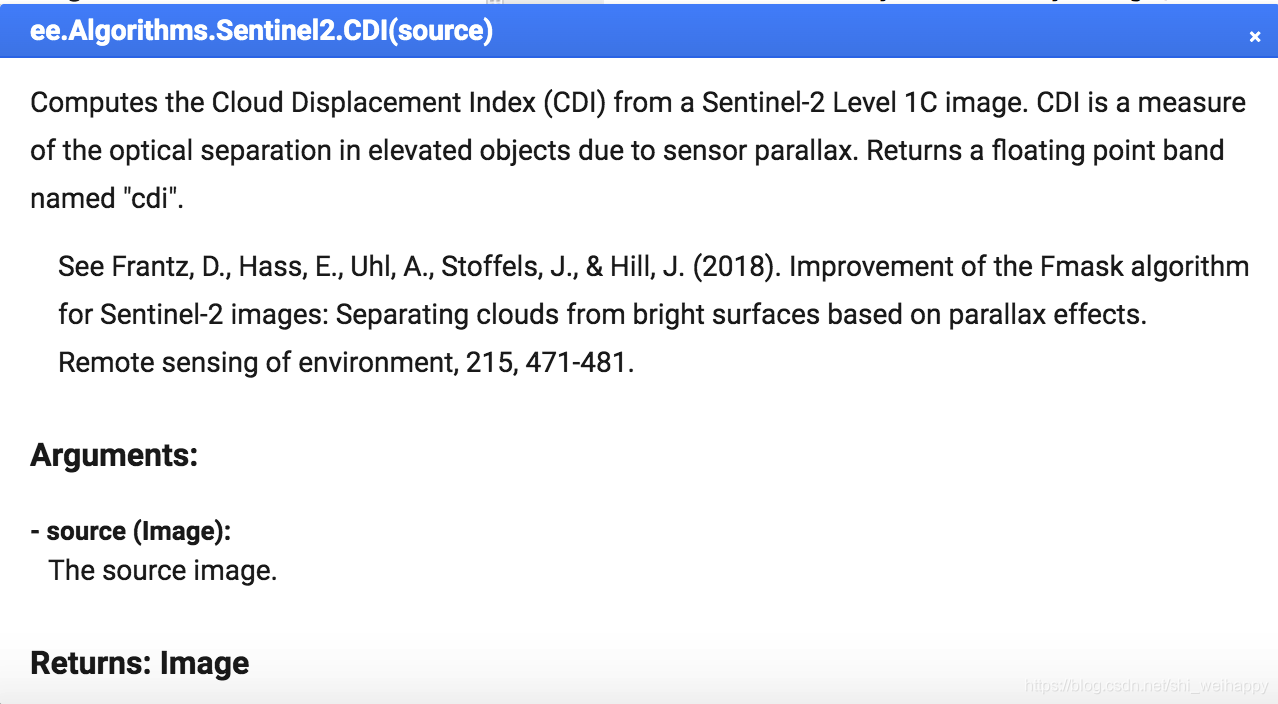 编辑
编辑
但是这个方法有一定的缺陷,大家想要用的话可以自行研究一下。
总结一下,这里面介绍了目前常用的哨兵2的去云方法,也展示了对于同一景影像不同去云方法最终实现的效果,大家可以通过对比来选择使用具体的方法来做,也可以同时结合多种算法来实现去云。需要说明的一点就是去云操作本身就没有完全完美的算法,每一种算法都有自己的缺陷和不足。以上面第三种最新的算法来说,它在大部分区域上计算云掩膜都比较不错,但是在某些特定的水体上却有问题,会把无云的地方计算的云量分数非常高。
来源请引用:地理遥感生态网科学数据注册与出版系统。




